

A ball is placed on a beam, see figure below, where it is allowed to roll...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
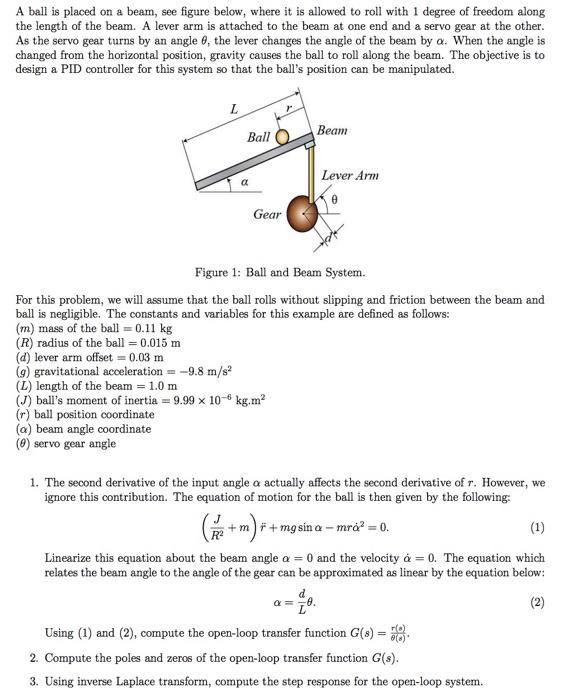
A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system.
Expert Answer:

Related Book For 
Posted Date:
Students also viewed these physics questions
-
For Figure, assume that the cylinder rolls without slipping and use conservation of energy to derive the equation of motion in terms of x. k2
-
For Figure, assume that the cylinder rolls without slipping and use the Rayleigh method to obtain an expression for the natural frequency of the system. The equilibrium position corresponds to x = 0....
-
A vertical tube is closed at one end and open to air at the other end. The air pressure is 1.01 105 Pa. The tube has a length of 0.75 m. Mercury (mass density = 13 600 kg/m3) is poured into it to...
-
A trader depreciates his vehicles at 40% per annum using the reducing balance method, with proportionate depreciation in the year of acquisition. In addition to vehicles acquired on 1 July 2010 for...
-
Browse to several sites that carry advertising, such as yahoo.com, latimes.com, time.com, aol.com, and bloomberg.com. Search each page to see if there are any Zappos ads. Which websites show an ad...
-
An organ pipe it 112 cm long. What are the fundamental and first three audible overtones if the pipe is? (a) Closed at one end, and (b) Open at both ends?
-
An account used to record the cost of the merchandise purchased for resale is called the resale account. (True/False)
-
Income is to be evaluated under four different situations as follows: a. Prices are rising: (1) Situation A: FIFO is used. (2) Situation B: LIFO is used. b. Prices are falling: (1) Situation C: FIFO...
-
Current Attempt in Progress The balance sheet for Sandhill Consulting reports the following information on July 1, 2020. Long-term liabilities Bonds payable $3,300,000 Less: Discount on bonds payable...
-
Vollmer Manufacturing makes three components for sale to refrigeration companies. The components are processed on two machines: a shaper and a grinder. The times (in minutes) required on each machine...
-
A 0.400 kg sample of aluminum (c = 9.10 x 10 2 J/kgC) at 95 C is dropped into a 0.550 kg pot of water which is at 18 C. What temperature will the mixture come to? How much thermal energy is absorbed...
-
Given C(x)=10x+3 and R(x) = 50x-0.5x2 Find each of the following a) Total Profit, P(x), b) Total Cost, C (x). Revenue R(x) and Profit P(x) from the production and sale of 40 units c) The Marginal...
-
A boat is stationary at 12 meters away from a dock. The boat then begins to move toward the dock with an acceleration of 5.0 m $2 How long will it take the boat to reach the dock? Your answer should...
-
Concord Company is a leading manufacturer of sunglasses. One of Concord's products protects the eyes from ultraviolet rays. An upscale sporting goods store has contacted Concord about purchasing...
-
Describe the normalization forms and why different normalization forms exist. Should normalization be done on all databases? To what form should databases be normalized?
-
Ivanhoe Corporation issued convertible bonds at a premium of $10400. The $200000 bond issue was convertible into 4400 shares of common stock (par value $20). Two years later, all of the bonds were...
-
Current Attempt in Progress An inexperienced bookkeeper prepared the following trial balance that does not balance. Prepare a correct trial balance, assuming all account balances are normal. SHERIDAN...
-
What are the three kinds of research types? Explain each type.
-
(a) Suppose that a NASCAR race car is moving to the right with a constant velocity of 182 m/s. What is the average acceleration of the car? (b) Twelve seconds later, the car is halfway around the...
-
Multiple-Concept Example 4 illustrates the concepts that are pertinent to this problem. A cylindrical brass rod (cross-sectional area = 1.3 10-5 m2) hangs vertically straight down from a ceiling....
-
A converging lens (f = 12.0 cm) is held 8.00 cm in front of a newspaper that has a print size with a height of 2.00 mm. Find (a) The image distance (in cm) (b) The height (in mm) of the magnified...
-
Can the purchase of a company by venture capitalists create value? And by trade buyers?
-
Why can we say that the mean or the median figure is the choice of an indecisive person?
-
Has a reduction in working capital of 1% the same impact on a DCF as a 1% improvement in the EBIT margin?

Study smarter with the SolutionInn App