

Camera model assignment Consider a perspective camera (i.e., pinhole camera) that acquires images of size 512...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
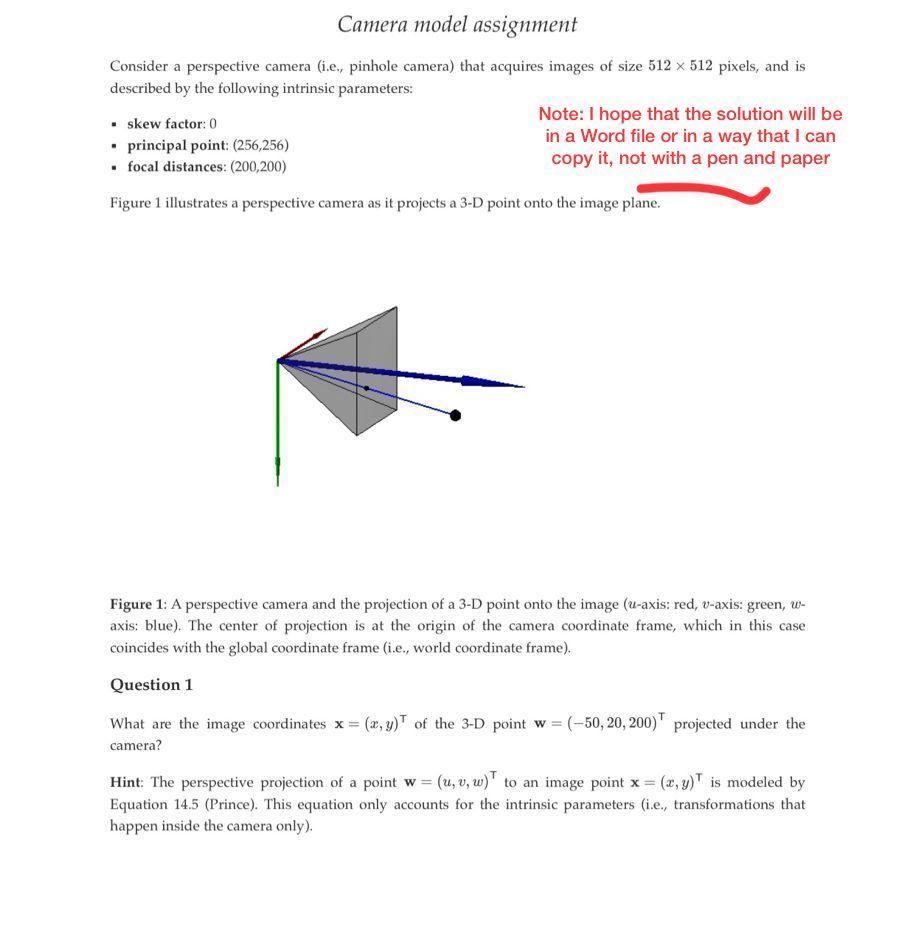
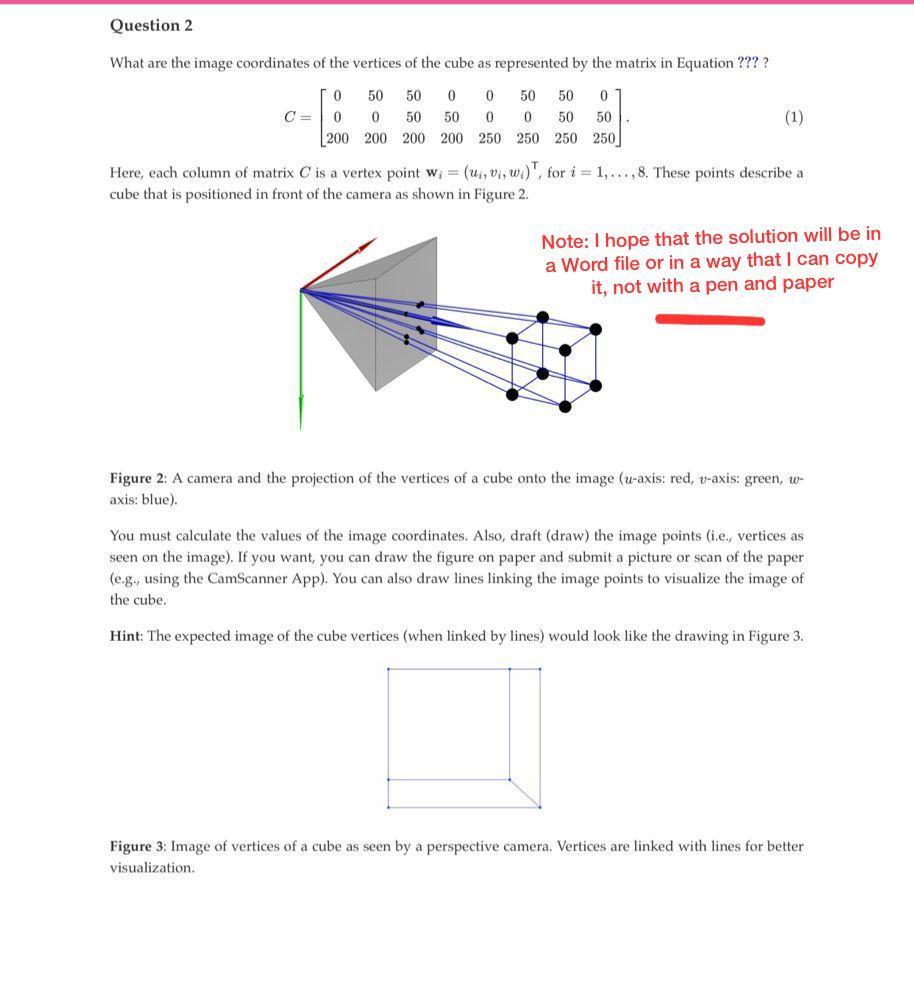
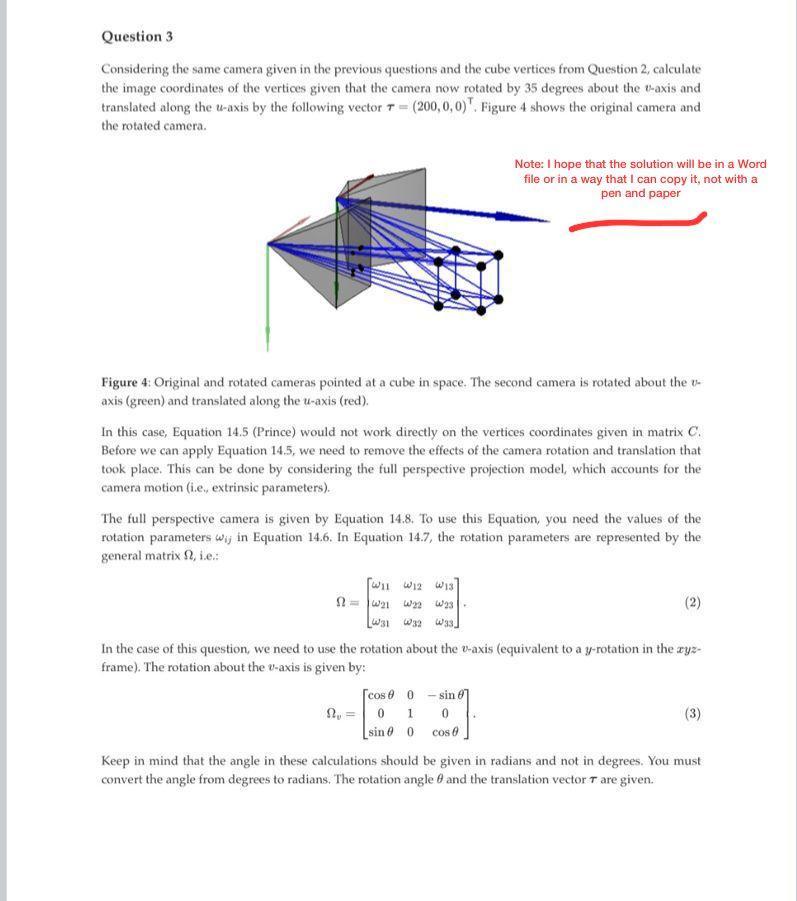
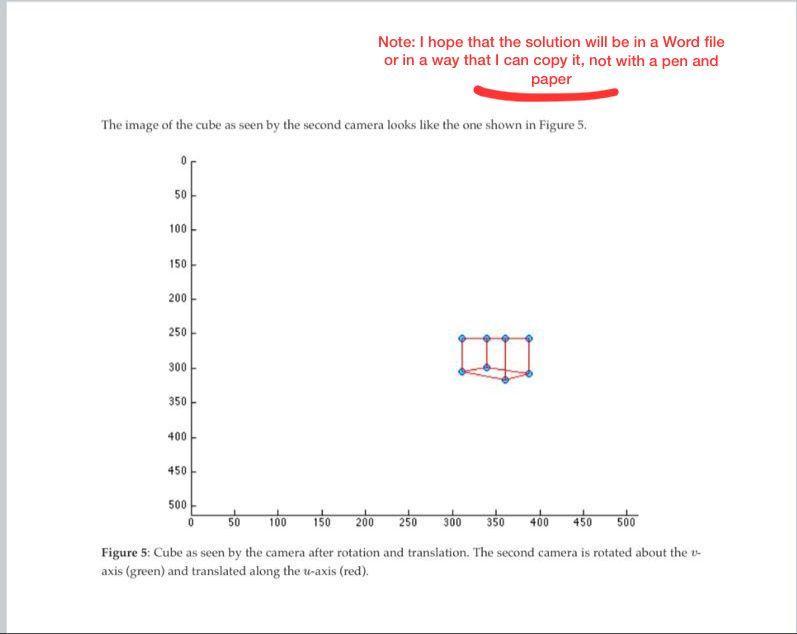
Camera model assignment Consider a perspective camera (i.e., pinhole camera) that acquires images of size 512 x 512 pixels, and is described by the following intrinsic parameters: Note: I hope that the solution will be in a Word file or in a way that I can copy it, not with a pen and paper • skew factor: 0 . principal point: (256,256) ▪ focal distances: (200,200) Figure 1 illustrates a perspective camera as it projects a 3-D point onto the image plane. Figure 1: A perspective camera and the projection of a 3-D point onto the image (u-axis: red, v-axis: green, w- axis: blue). The center of projection is at the origin of the camera coordinate frame, which in this case coincides with the global coordinate frame (i.e., world coordinate frame). Question 1 What are the image coordinates x = (x, y) of the 3-D point w = (-50, 20, 200) projected under the camera? Hint: The perspective projection of a point w = (u, v, w) to an image point x = (x, y) is modeled by Equation 14.5 (Prince). This equation only accounts for the intrinsic parameters (i.e., transformations that happen inside the camera only). Question 2 What are the image coordinates of the vertices of the cube as represented by the matrix in Equation ???? 0 50 50 0 50 50 0 0 0 50 50 0 0 50 50 200 200 200 200 250 250 250 250 0 C = (1) Here, each column of matrix C is a vertex point w₁ = (ui, vi, w), for i=1,...,8. These points describe a cube that is positioned in front of the camera as shown in Figure 2. Note: I hope that the solution will be in a Word file or in a way that I can copy it, not with a pen and paper Figure 2: A camera and the projection of the vertices of a cube onto the image (u-axis: red, v-axis: green, w- axis: blue). You must calculate the values of the image coordinates. Also, draft (draw) the image points (i.e., vertices as seen on the image). If you want, you can draw the figure on paper and submit a picture or scan of the paper (e.g., using the CamScanner App). You can also draw lines linking the image points to visualize the image of the cube. Hint: The expected image of the cube vertices (when linked by lines) would look like the drawing in Figure 3. Figure 3: Image of vertices of a cube as seen by a perspective camera. Vertices are linked with lines for better visualization. Question 3 Considering the same camera given in the previous questions and the cube vertices from Question 2, calculate the image coordinates of the vertices given that the camera now rotated by 35 degrees about the t-axis and translated along the u-axis by the following vector = (200,0,0). Figure 4 shows the original camera and the rotated camera. Figure 4: Original and rotated cameras pointed at a cube in space. The second camera is rotated about the u- axis (green) and translated along the u-axis (red). In this case, Equation 14.5 (Prince) would not work directly on the vertices coordinates given in matrix C. Before we can apply Equation 14.5, we need to remove the effects of the camera rotation and translation that took place. This can be done by considering the full perspective projection model, which accounts for the camera motion (i.e., extrinsic parameters). Note: I hope that the solution will be in a Word file or in a way that I can copy it, not with a pen and paper The full perspective camera is given by Equation 14.8. To use this Equation, you need the values of the rotation parameters wij in Equation 14.6. In Equation 14.7, the rotation parameters are represented by the general matrix 2, i.e.: [WI1 WI2 W13] = W21 W22 W23 W31 W32 W33. cos 0 0 9, 01 sin 00 In the case of this question, we need to use the rotation about the v-axis (equivalent to a y-rotation in the zyz- frame). The rotation about the v-axis is given by: -sin 6 0 cos 0 (2) (3) Keep in mind that the angle in these calculations should be given in radians and not in degrees. You must convert the angle from degrees to radians. The rotation angle 8 and the translation vector 7 are given. The image of the cube as seen by the second camera looks like the one shown in Figure 5. 50 100 150 200 250 300 350 400 450 500 Note: I hope that the solution will be in a Word file or in a way that I can copy it, not with a pen and paper 50 150 200 250 300 350 400 450 500 Figure 5: Cube as seen by the camera after rotation and translation. The second camera is rotated about the v- axis (green) and translated along the u-axis (red). 100 Camera model assignment Consider a perspective camera (i.e., pinhole camera) that acquires images of size 512 x 512 pixels, and is described by the following intrinsic parameters: Note: I hope that the solution will be in a Word file or in a way that I can copy it, not with a pen and paper • skew factor: 0 . principal point: (256,256) ▪ focal distances: (200,200) Figure 1 illustrates a perspective camera as it projects a 3-D point onto the image plane. Figure 1: A perspective camera and the projection of a 3-D point onto the image (u-axis: red, v-axis: green, w- axis: blue). The center of projection is at the origin of the camera coordinate frame, which in this case coincides with the global coordinate frame (i.e., world coordinate frame). Question 1 What are the image coordinates x = (x, y) of the 3-D point w = (-50, 20, 200) projected under the camera? Hint: The perspective projection of a point w = (u, v, w) to an image point x = (x, y) is modeled by Equation 14.5 (Prince). This equation only accounts for the intrinsic parameters (i.e., transformations that happen inside the camera only). Question 2 What are the image coordinates of the vertices of the cube as represented by the matrix in Equation ???? 0 50 50 0 50 50 0 0 0 50 50 0 0 50 50 200 200 200 200 250 250 250 250 0 C = (1) Here, each column of matrix C is a vertex point w₁ = (ui, vi, w), for i=1,...,8. These points describe a cube that is positioned in front of the camera as shown in Figure 2. Note: I hope that the solution will be in a Word file or in a way that I can copy it, not with a pen and paper Figure 2: A camera and the projection of the vertices of a cube onto the image (u-axis: red, v-axis: green, w- axis: blue). You must calculate the values of the image coordinates. Also, draft (draw) the image points (i.e., vertices as seen on the image). If you want, you can draw the figure on paper and submit a picture or scan of the paper (e.g., using the CamScanner App). You can also draw lines linking the image points to visualize the image of the cube. Hint: The expected image of the cube vertices (when linked by lines) would look like the drawing in Figure 3. Figure 3: Image of vertices of a cube as seen by a perspective camera. Vertices are linked with lines for better visualization. Question 3 Considering the same camera given in the previous questions and the cube vertices from Question 2, calculate the image coordinates of the vertices given that the camera now rotated by 35 degrees about the t-axis and translated along the u-axis by the following vector = (200,0,0). Figure 4 shows the original camera and the rotated camera. Figure 4: Original and rotated cameras pointed at a cube in space. The second camera is rotated about the u- axis (green) and translated along the u-axis (red). In this case, Equation 14.5 (Prince) would not work directly on the vertices coordinates given in matrix C. Before we can apply Equation 14.5, we need to remove the effects of the camera rotation and translation that took place. This can be done by considering the full perspective projection model, which accounts for the camera motion (i.e., extrinsic parameters). Note: I hope that the solution will be in a Word file or in a way that I can copy it, not with a pen and paper The full perspective camera is given by Equation 14.8. To use this Equation, you need the values of the rotation parameters wij in Equation 14.6. In Equation 14.7, the rotation parameters are represented by the general matrix 2, i.e.: [WI1 WI2 W13] = W21 W22 W23 W31 W32 W33. cos 0 0 9, 01 sin 00 In the case of this question, we need to use the rotation about the v-axis (equivalent to a y-rotation in the zyz- frame). The rotation about the v-axis is given by: -sin 6 0 cos 0 (2) (3) Keep in mind that the angle in these calculations should be given in radians and not in degrees. You must convert the angle from degrees to radians. The rotation angle 8 and the translation vector 7 are given. The image of the cube as seen by the second camera looks like the one shown in Figure 5. 50 100 150 200 250 300 350 400 450 500 Note: I hope that the solution will be in a Word file or in a way that I can copy it, not with a pen and paper 50 150 200 250 300 350 400 450 500 Figure 5: Cube as seen by the camera after rotation and translation. The second camera is rotated about the v- axis (green) and translated along the u-axis (red). 100
Expert Answer:
Answer rating: 100% (QA)
Question 1 To calculate the image coordinates of a 3D point w 50 20 200 projected under the camera we can use Equation 145 x f u w f v w cx cy Given the following intrinsic parameters Skew factor 0 Pr... View the full answer

Posted Date:
Students also viewed these accounting questions
-
The supply of paper is described by the following equation: Qs = 5,000P where Qs is tons supplied per year and P is the price per ton. The demand is described by QD = 400,000 1,000P where QD is tons...
-
A discrete-time system is described by the following state-space model:v(n + 1) = Fv(n) + qx(n)y(n) = gtv(n) + dx(n)where(a) Sketch the corresponding state-space structure.(b) Calculate the impulse...
-
A process is described by the following transfer function Thus, it exhibits characteristics of both first-order and integrating processes. How could you utilize a step change in the input of...
-
The economic environment of our country currently does not lend itself to being able to successfully run capital campaigns. In a two page document, research and identify 2 successfully capital...
-
Calculate ROE if ROI = 12%, RD = 10%, B = $200,000, SE = $300,000, and T = 0.35. Identify the business risk and financial risk.
-
The geometric implications of a V-flat drive are interesting. (a) If the earths equator was an inextensible string, snug to the spherical earth, and you spliced 6 ft of string into the equatorial...
-
How is a present value factor determined?
-
In divisional income statements prepared for Brooks Construction Company, the Payroll Department costs are charged back to user divisions on the basis of the number of payroll checks, and the...
-
An investor enters into a futures contract to buy white maize for R2 900 per tonne. The contract is for delivery of 1 000 tonnes. The initial margin is R 550 000 and the maintenance margin is R250...
-
The cable supports the three loads shown. Determine the sags yB and yD of points B and D. Given: a = 4 ft b = 12 ft c = 20 ft d = 15 ft e = 12 ft f = 14 ft P1 = 400 lb P2 = 250 lb B D. P: P,V
-
Capital sponsors a 401(k) profit sharing plan. In the current year, ignoring ADP/ACP rules, if "Dollar" Bill, age 57, earns $100,000, what is the maximum amount he can defer in the 401(k) plan for...
-
The loadability of short transmission lines (less than 80 km, represented by including only series resistance and reactance) is determined by___________; that of medium lines (less than 250 km,...
-
Optical fibers are made by drawing the hot glass from a furnace as shown in Figure P15.7. Heat, generated in the furnace, is transferred by conduction along the drawn glass fiber, by convection to...
-
Contractors in the Southwest generally coat roofs with light materials designed to keep the interior of homes cool. It has been suggested that the same practice be followed in the North. We would...
-
If A and B form a limited liability company or limited partnership to conduct their business venture, how will the entity be classified for federal tax purposes? What if A alone forms a limited...
-
The spectral emissivity for a material is shown in Figure P15.16 and does not depend much on the temperature. a. What is the total hemispherical absorptivity for the material if it is exposed to...
-
B FX EQ B FX EQ -0.2 0.4 - 0.1
-
Solve each problem. Find the coordinates of the points of intersection of the line y = 2 and the circle with center at (4, 5) and radius 4.
-
The law of diminishing marginal product reflects the fact that by adding increasing quantities of a(n) _________ input (e.g., labor) to fixed quantities of another input, output will rise, but at...
-
As the wage rate rises, the quantity of labor supplied _________, ceteris paribus; as the wage falls, the quantity of labor supplied _________, ceteris paribus.
-
A firm would find its profits growing by adding one more worker when the _________ associated with the worker exceeds the _________ of the worker.

Study smarter with the SolutionInn App