

In this lab, we will use the inverse kinematics to identify two functions to generate an...
Fantastic news! We've Found the answer you've been seeking!
Question:

Transcribed Image Text:
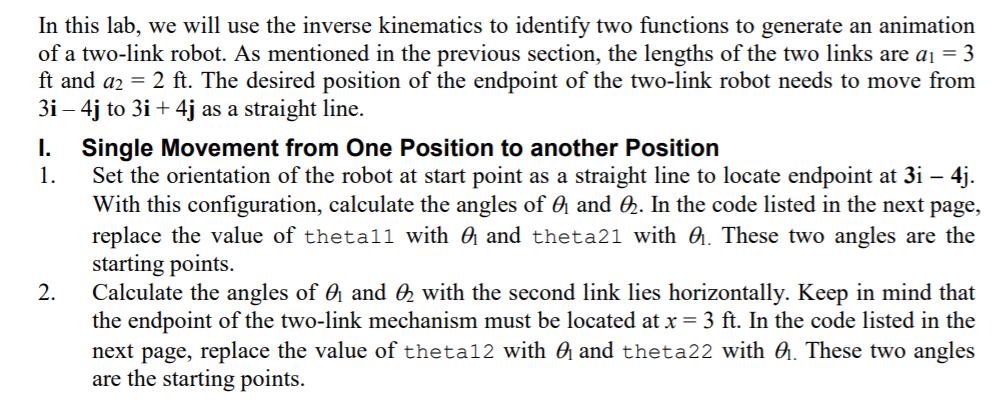
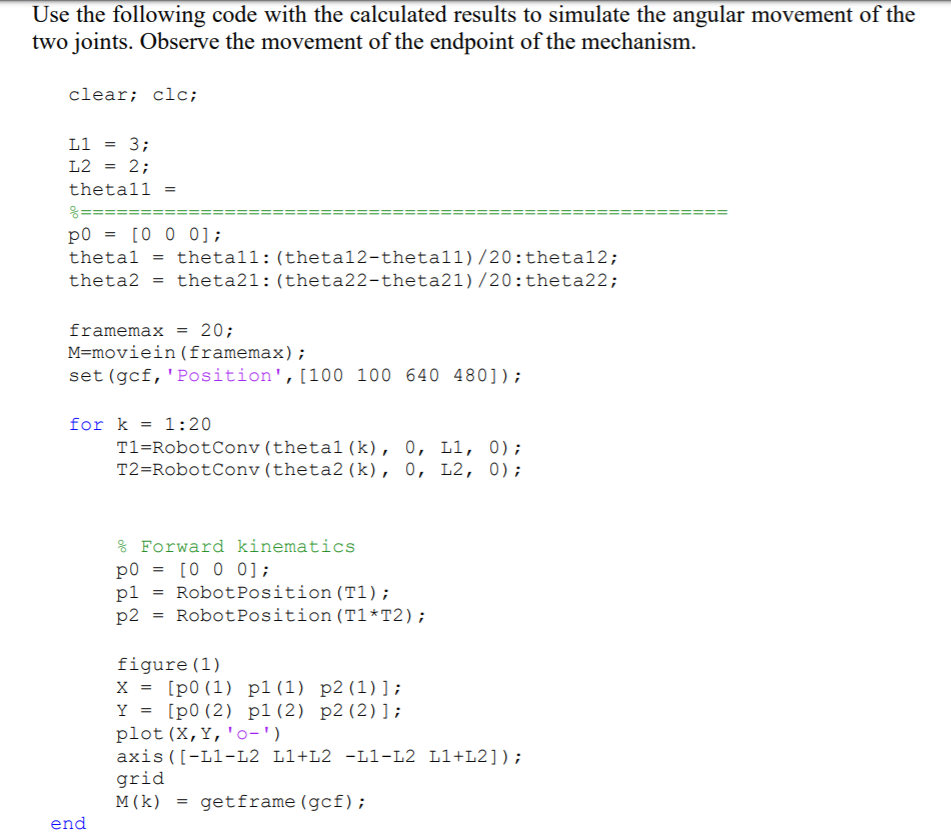
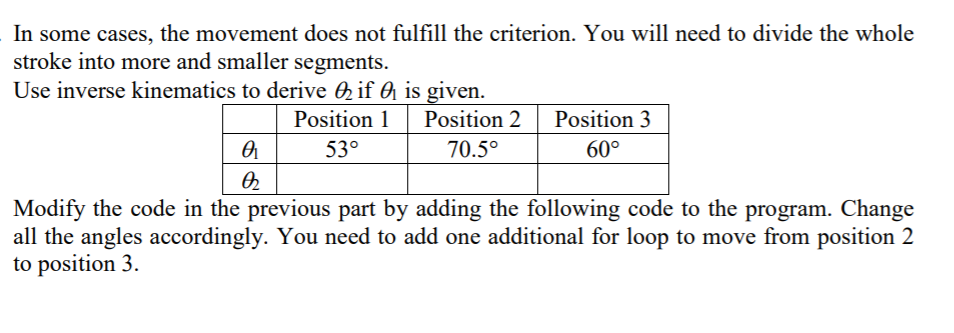
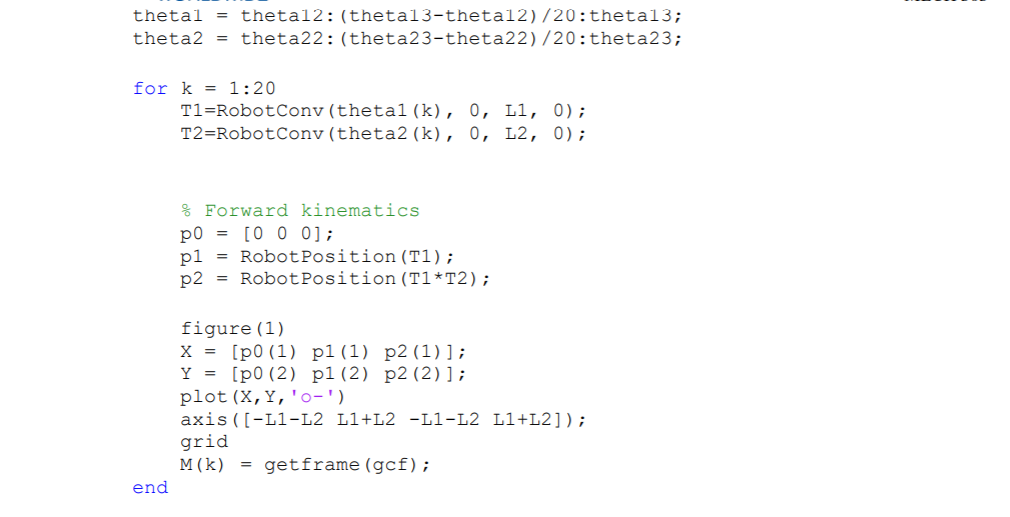
In this lab, we will use the inverse kinematics to identify two functions to generate an animation of a two-link robot. As mentioned in the previous section, the lengths of the two links are a₁ = 3 ft and a2 = 2 ft. The desired position of the endpoint of the two-link robot needs to move from 3i − 4j to 3i + 4j as a straight line. I. Single Movement from One Position to another Position 1. Set the orientation of the robot at start point as a straight line to locate endpoint at 3i – 4j. With this configuration, calculate the angles of & and §. In the code listed in the next page, replace the value of thetall with and theta21 with ₁. These two angles are the starting points. Calculate the angles of ₁ and 2 with the second link lies horizontally. Keep in mind that the endpoint of the two-link mechanism must be located at x = 3 ft. In the code listed in the next page, replace the value of theta12 with and theta22 with . These two angles are the starting points. 2. Use the following code with the calculated results to simulate the angular movement of the two joints. Observe the movement of the endpoint of the mechanism. clear; clc; L1 = 3; L2 = 2; thetall = %= po = [0 0 0]; thetal = theta2 = framemax = 20; M=moviein (framemax); set (gcf, 'Position', [100 100 640 480]); for k = 1:20 end thetall: (theta12-thetall) /20: theta12; theta21: (theta22-theta21) /20: theta22; T1=Robot Conv (thetal (k), 0, L1, 0); T2=RobotConv (theta2 (k), 0, L2, 0); % Forward kinematics po [0 0 0]; pl Robot Position (T1); p2 = Robot Position (T1*T2); = = figure (1) X= [p0 (1) p1 (1) p2 (1) ]; Y = [p0 (2) p1 (2) p2 (2) ]; plot (X, Y, '0- ') axis ([-L1-L2 L1+L2 -L1-L2 L1+L2]); grid M(K) = getframe (gcf); In some cases, the movement does not fulfill the criterion. You will need to divide the whole stroke into more and smaller segments. Use inverse kinematics to derive if Position 1 53° 0₁ க is given. Position 2 Position 3 70.5° 60° Modify the code in the previous part by adding the following code to the program. Change all the angles accordingly. You need to add one additional for loop to move from position 2 to position 3. thetal = thetal2: (thetal3-thetal2)/20: theta13; theta2 = theta22: (theta23-theta22) /20: theta23; for k=1:20 end T1=Robot Conv (thetal (k), 0, L1, 0); T2=RobotConv (theta2 (k), 0, L2, 0); & Forward kinematics p0 = [0 0 0]; pl = Robot Position (T1); p2 = Robot Position (T1*T2); figure (1) X = [p0 (1) p1 (1) p2 (1) 1; Y [p0 (2) p1 (2) p2 (2) ] ; plot (X, Y, '¹0-') axis ([-L1-L2 L1+L2 -L1-L2 L1+L2]); grid M(K) = getframe (gcf); In this part, you need to plan the trajectory from 3i − 4j to 3i + 4j as a straight line. Generate a table with all the planned angles. Write the code and simulate the movement of the two-link mechanism. In this lab, we will use the inverse kinematics to identify two functions to generate an animation of a two-link robot. As mentioned in the previous section, the lengths of the two links are a₁ = 3 ft and a2 = 2 ft. The desired position of the endpoint of the two-link robot needs to move from 3i − 4j to 3i + 4j as a straight line. I. Single Movement from One Position to another Position 1. Set the orientation of the robot at start point as a straight line to locate endpoint at 3i – 4j. With this configuration, calculate the angles of & and §. In the code listed in the next page, replace the value of thetall with and theta21 with ₁. These two angles are the starting points. Calculate the angles of ₁ and 2 with the second link lies horizontally. Keep in mind that the endpoint of the two-link mechanism must be located at x = 3 ft. In the code listed in the next page, replace the value of theta12 with and theta22 with . These two angles are the starting points. 2. Use the following code with the calculated results to simulate the angular movement of the two joints. Observe the movement of the endpoint of the mechanism. clear; clc; L1 = 3; L2 = 2; thetall = %= po = [0 0 0]; thetal = theta2 = framemax = 20; M=moviein (framemax); set (gcf, 'Position', [100 100 640 480]); for k = 1:20 end thetall: (theta12-thetall) /20: theta12; theta21: (theta22-theta21) /20: theta22; T1=Robot Conv (thetal (k), 0, L1, 0); T2=RobotConv (theta2 (k), 0, L2, 0); % Forward kinematics po [0 0 0]; pl Robot Position (T1); p2 = Robot Position (T1*T2); = = figure (1) X= [p0 (1) p1 (1) p2 (1) ]; Y = [p0 (2) p1 (2) p2 (2) ]; plot (X, Y, '0- ') axis ([-L1-L2 L1+L2 -L1-L2 L1+L2]); grid M(K) = getframe (gcf); In some cases, the movement does not fulfill the criterion. You will need to divide the whole stroke into more and smaller segments. Use inverse kinematics to derive if Position 1 53° 0₁ க is given. Position 2 Position 3 70.5° 60° Modify the code in the previous part by adding the following code to the program. Change all the angles accordingly. You need to add one additional for loop to move from position 2 to position 3. thetal = thetal2: (thetal3-thetal2)/20: theta13; theta2 = theta22: (theta23-theta22) /20: theta23; for k=1:20 end T1=Robot Conv (thetal (k), 0, L1, 0); T2=RobotConv (theta2 (k), 0, L2, 0); & Forward kinematics p0 = [0 0 0]; pl = Robot Position (T1); p2 = Robot Position (T1*T2); figure (1) X = [p0 (1) p1 (1) p2 (1) 1; Y [p0 (2) p1 (2) p2 (2) ] ; plot (X, Y, '¹0-') axis ([-L1-L2 L1+L2 -L1-L2 L1+L2]); grid M(K) = getframe (gcf); In this part, you need to plan the trajectory from 3i − 4j to 3i + 4j as a straight line. Generate a table with all the planned angles. Write the code and simulate the movement of the two-link mechanism.
Expert Answer:

Related Book For 
Posted Date:
Students also viewed these physics questions
-
In this exercise we will use the expressions given in section 9.6.3 on page 271 and in section 9.8.5 on page 296 to calculate the relaxation rate constants which arise from the dipolar relaxation of...
-
In this question we will use the sentences you wrote in Exercise 9.9 to answer a question using a backward-chaining algorithm. a. Draw the proof tree generated by an exhaustive backward-chaining...
-
For this problem we will use the data in the file Global100 that was referenced in Section 3.4 as an example for creating a treemap. Here we will use these data to create a GIS chart. A portion of...
-
A psychologist shows a list of eight activities to a subject in an experiment. How many ways can the subject pick a first, second, and third activity? a. Identify the total number of objects n and...
-
Kalamazoo Competition-Free Concrete (KCC) is a local monopolist of ready-mix concrete. Its annual demand function is Qd = 16,000 - 2P, has variable costs of VC = 20Q + 0.0025Q2, marginal costs of MC...
-
Managers and sales experts agree that certain personal traits, such as being salesperson. are necessary to be a successful O optimistic O stubborn O rigid O inflexible O unmotivated
-
Discuss differences between private inurement and private benefit. Why do nonprofit organizations need to differentiate between these two concepts?
-
Sub-Prime Loan Company is thinking of opening a new office, and the key data are shown below. The company owns the building that would be used, and it could sell it for $100,000 after taxes if it...
-
The adjusted trial balance for Chiara Company as of December 31 follows. Cash 45 Accounts receivable Interest receivable Notes receivable (due in 90 days) office supplies Automobiles Accumulated...
-
List three main departures that the U.C.C. made from the common law of contracts. Also explain all of these.
-
Configuring Network Address Translation (NAT) Documentation Task 1 . From the attached hosts, ping the Fast Ethernet on 10.10.10.1 interface of the default gateway router. Was the ping from the first...
-
Write an introduction based on a literature review of disaster management related to informatics and communications including the role of the informatics leader including traits and foundations for...
-
Predict the amounts that the firm will announce for (Basic) Earnings Per Share and Fully-Diluted Earnings Per Share. You are an analyst waiting for a firm's year-end conference call to start and are...
-
Bill and Benita are competitors who both operate businesses providing book keeping services for building contractors. Bill is a sole trader and Benita has registered her business as a single...
-
Creating a Strategic Marketing Process in 5 Steps Step 1: Define your mission, goals and values Step 2: Analyze your industry positioning: Competitor analysis Step 3: Establish marketing tactics....
-
A coffee company based in Malaysia is considering investing in the coffee manufacturing facility in two overseas markets: (1) the Philippines and (2) Indonesia. According to the report for both...
-
John Croissant ( 4 0 ) and Maria Croissant ( 3 8 ) . The married couple has two children, Jack, and Alexa. Jack is a 1 2 - year - old boy and Alexa is a 1 0 - year - old girl. John is a manager at...
-
A copper sphere of 10-mm diameter, initially at a prescribed elevated temperature T;, is quenched in a saturated (1 atm) water bath. Using the lumped capacitance method, estimate the time for the...
-
Using the approach described in section 6.8.1 on page 127, show that for a spin described by the wavefunction the matrix representation of the density operator is given by W) = c, la) + cgB).
-
Following the approach of section 3.5 on page 35, show that Ïa.1 Ïa.2 is an eigenfunction of the Hamiltonian for two spins with no coupling between them: Hence find the corresponding...
-
Write the following in Dirac notation: Express the following statements in Dirac notation: (a) Ïa is normalized; (b) Ïa and Ïβ are orthogonal; (c) Ïa is an...
-
Consider a publicly held company whose products you are familiar with. Some examples might include: Access the companys public website and search for its most recent annual report. (Some companies...
-
The 2014 financial statements of LVMH Moet Hennessey-Louis Vuitton S.A.LVMH is a Paris-based holding company and one of the worlds largest and best-known luxury goods companies. As a member-nation of...
-
Assume that an income statement contains each of the three sections listed below. Which will be the last section presented in the income statement? a. Gross profit b. Income from continuing...

Study smarter with the SolutionInn App