

In Figure P7.16, the plant, P(s) = 48,500/s 2 + 2.89s; represents the dynamics of a robotic
Question:
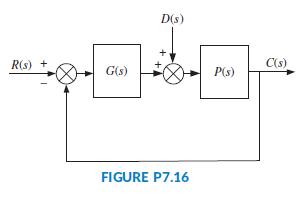
In Figure P7.16, the plant, P(s) = 48,500/s2 + 2.89s; represents the dynamics of a robotic manipulator joint. The system’s output, C(s), is the joint’s angular position (Low, 2005). The system is controlled in a closed loop configuration as shown with G(s) = KP + KI/s, a proportional plus-integral (PI) controller to be discussed in Chapter 9. R(s) is the joint’s desired angular position. D(s) is an external disturbance, possibly caused by improper dynamics modeling, Coulomb friction, or other external forces acting on the joint.
a. Find the system’s type.
b. Show that for a step disturbance input, ess = 0 when KI ≠ 0.
c. Find the value of KI that will result in ess = 5% for a parabolic input.
d. Using the value of KI found in Part c, find the range of KP for closed-loop stability.
Step by Step Answer:



