

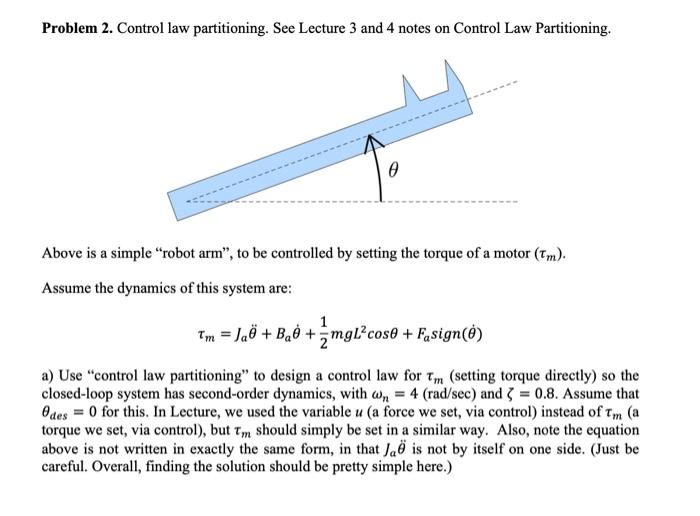
Problem 2. Control law partitioning. See Lecture 3 and 4 notes on Control Law Partitioning. 0...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:
To design a control law using control law partitioning for the given system well start with part a where we directly set the torque Tm Then well move ... View the full answer

Related Book For 
Process Dynamics and Control
ISBN: 978-1119385561
4th edition
Authors: Dale E. Seborg, Thomas F. Edgar, Duncan A. Mellichamp, Francis J. Doyle
Posted Date:
