

The torque about the origin O due to a force F acting on an object with position
Question:
The torque about the origin O due to a force F acting on an object with position vector r is the vector quantity τ = r × F. If several forces Fj act at positions rj, then the net torque (units: N-m or lb-ft) is the sum
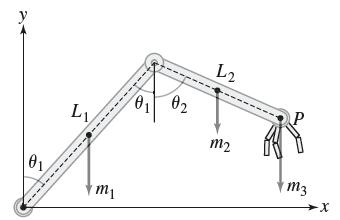
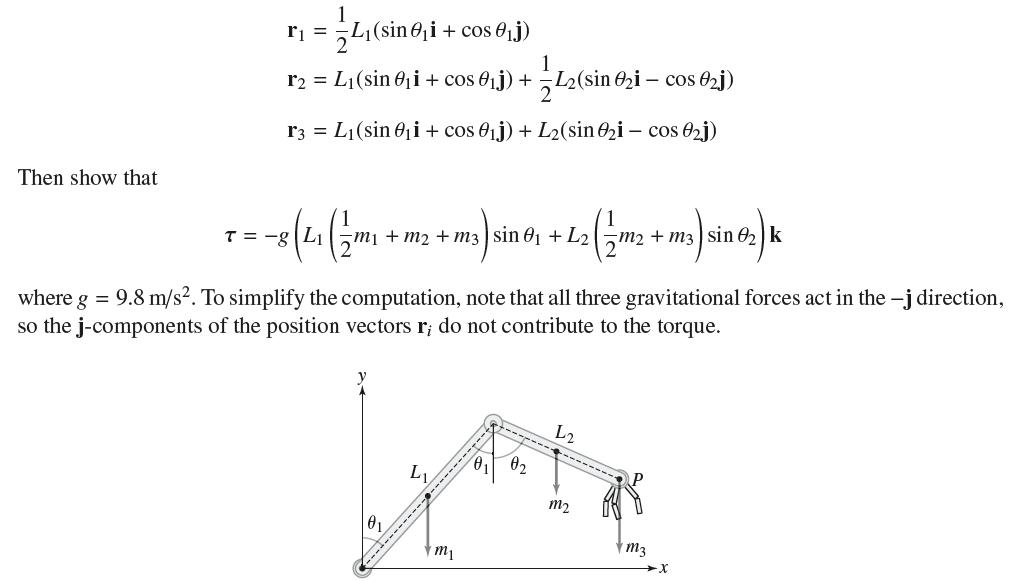
Let τ be the net torque about O acting on the robotic arm of Figure 22, here taking into account the weight of the arms themselves. Assume that the arms have mass m1 and m2 (in kilograms) and that a weight of m3 kg is located at the endpoint P. In calculating the torque, we may assume that the entire mass of each arm segment lies at the midpoint of the arm (its center of mass). Show that the position vectors of the masses m1, m2, and m3 are
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:
We denote by O P ...View the full answer

Answered By
Khurram shahzad
I am an experienced tutor and have more than 7 years’ experience in the field of tutoring. My areas of expertise are Technology, statistics tasks I also tutor in Social Sciences, Humanities, Marketing, Project Management, Geology, Earth Sciences, Life Sciences, Computer Sciences, Physics, Psychology, Law Engineering, Media Studies, IR and many others.
I have been writing blogs, Tech news article, and listicles for American and UK based websites.
5+ Reviews
17+ Question Solved
Related Book For 
Question Posted:
