

Question: A Type 3 feedback control system (Papadopoulos, 2013) was presented in Problem 60. Modify the Simulink model you developed in that problem to plot its
A Type 3 feedback control system (Papadopoulos, 2013) was presented in Problem 60. Modify the Simulink model you developed in that problem to plot its response (from 0 to 100 seconds) to a unit-ramp reference input, r(t) = tu(t), applied at t = 0, and (on the same graph) to a disturbance, d(t) = 0.25tu(t), applied at t = 50 seconds. What are the values of the steady-state position error due to the reference-input and disturbance ramps?
Copy this model and paste it in the same file. Then, in that copy, change the reference input to a unit parabola, r(t) = 0.5 t2 u(t), applied at t = 0, and the disturbance to d(t) = 0.125t2u(t), applied at t = 50 seconds, and plot, on a new graph (Scope 1),the system’s response to these parabolic signals.
Data From Problem 60:
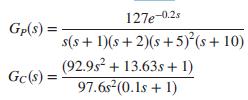
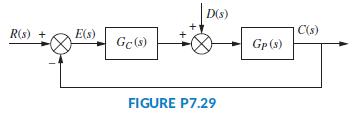
PID control, may be recommended for Type 3 systems when the output in a feedback system is required to perfectly track a parabolic as well as step and ramp reference signals (Papadopoulos, 2013). In the system of Figure P7.29, the transfer functions of the plant, GP(s), and the recommended controller, GC(s), are given by:
Use Simulink to model this system and plot its response (from 0 to 300 seconds) to a unit-step reference input, r(t), applied at t = 0, and (on the same graph) to a disturbance, d(t) = 0.25 r (t), applied at t = 150 seconds. What are the values of the steady-state error due to the reference input and due to the disturbance? What about the relative stability of this Type 3 system as evidenced by the percent overshoot in response to the unit-step reference input?
127e-02s Gp(s) = s(s + 1)(s+ 2)(s+5) (s+ 10) (92.9s? + 13.63s+ 1) 97.6s (0.1s + 1) Gc(s) =
Step by Step Solution
3.41 Rating (154 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts