

Harmonic drives are very popular for use in robotic manipulators due to their low backlash, high torque
Question:
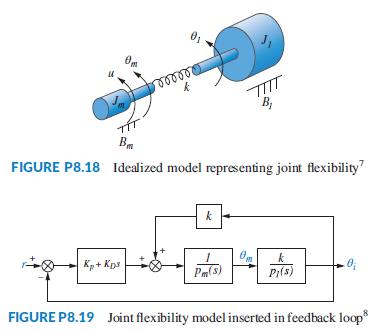
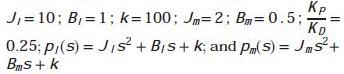
Harmonic drives are very popular for use in robotic manipulators due to their low backlash, high torque transmission, and compact size (Spong, 2006). The problem of joint flexibility is sometimes a limiting factor in achieving good performance. Consider that the idealized model representing joint flexibility is shown in Figure P8.18. The input to the drive is from an actuator and is applied at θm. The output is connected to a load at θl. The spring represents the joint flexibility and Bm and Bl represent the viscous damping of the actuator and load, respectively. Now we insert the device into the feedback loop shown in Figure P8.19. The first block in the forward path is a PD controller, which we will study in the next chapter. The PD controller is used to improve transient response performance.
Use MATLAB to find the gain KD to yield an approximate 5% overshoot in the step response given the following parameters:
Step by Step Answer:
To find the gain KD that yields an approximate 5 overshoot in the step response we can u...View the full answer



