

Repeat Problem 1.1-4 with the transfer functions Problem 1.1-4 A feedback control system is illustrated in Fig.
Question:
Repeat Problem 1.1-4 with the transfer functions![H(s) = 1 For part (e), recall that the transfer-function underdamped pole term [(s+ a) + b] yields a time =](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1705/3/9/9/56365a6550b92cfd1705399562140.jpg)
Problem 1.1-4
A feedback control system is illustrated in Fig. P1.1-4. The plant transfer function is given by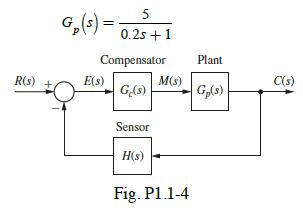
(a) Write the differential equation of the plant. This equation relates c(t) and m(t) .
(b) Modify the equation of part
(a) to yield the system differential equation; this equation relates c(t) and r(t). The compensator and sensor transfer functions are given by![]()
(c) Derive the system transfer function from the results of part (b).
(d) It is shown in Problem 1.1-2
(a) that the closed-loop transfer function of the system of Fig.
P1.1-4 is given by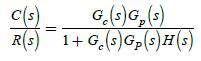
Use this relationship to verify the results of part (c).
(e) Recall that the transfer-function pole term (s +
a) yields a time constant τ = 1 a , where a is real. Find the time constants for both the open-loop and closed-loop systems.
Step by Step Answer:
a Gs d Cs 3s 8 Ms s 2s2 s 252Cs 3s 8 Ms ct 2t 2ct 3mt 8mt b mt 2et ...View the full answer



Digital Control System Analysis And Design
ISBN: 9780132938310
4th Edition
Authors: Charles Phillips, H. Nagle, Aranya Chakrabortty
