

Question: The arm of the robot has a variable length so that r remains constant and its grip. A moves along the path z = a
The arm of the robot has a variable length so that r remains constant and its grip. A moves along the path z = a sinb θ. If θ = ct, determine the magnitudes of the grip’s velocity and acceleration when t = t1. Given:
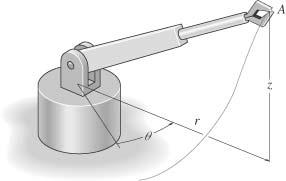
r = 3 ft a = 3 ft b = 4 c = 0.5 rad S t1 = 3 s 11
Step by Step Solution
★★★★★
3.46 Rating (159 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

0 ct 8 c t t1 rad 8 0 2 S r r ft ... View full answer
Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock