

Consider a modified version of the model with uncertainty from section 9.2 . Assume that the firm
Question:
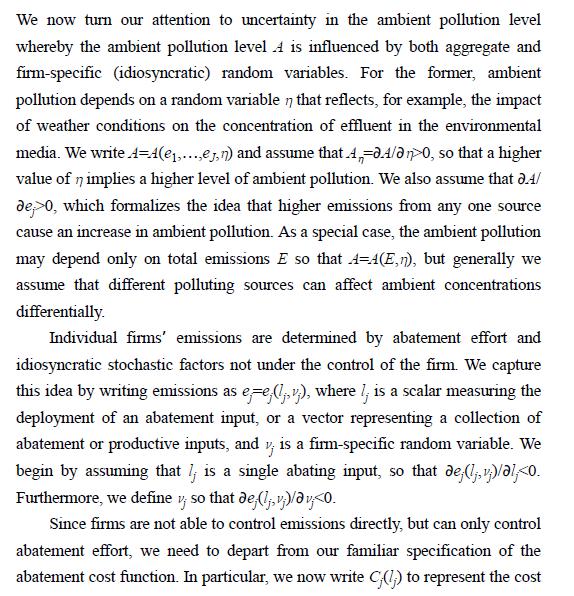
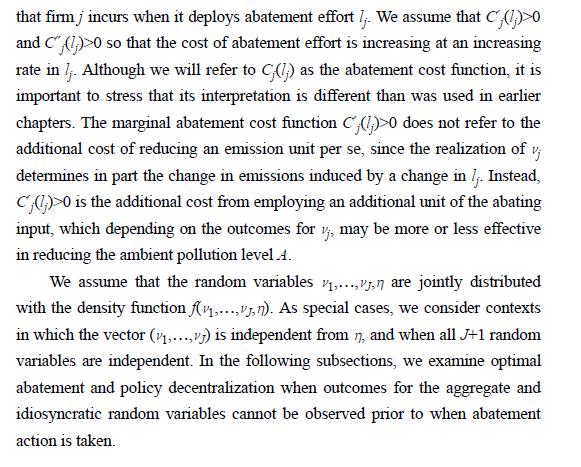
Consider a modified version of the model with uncertainty from section 9.2 . Assume that the firm is characterized by an output production function gj(lj), where lj is now a single productive input, and emissions are given by ej(lj,νj), where now ∂ej(lj,νj)/∂lj>0 (that is, the input is now polluting rather than abating).
(a) Derive the formula for the optimal firm-specific tax rates.
(b) Derive the formula for the second-best optimal uniform tax.
Assume now that lj is a vector, where some inputs are productive but polluting such that ∂gj(lj)/∂ljk>0 and ∂ej(lj,νj)/∂ljk>0, while others are costly but reduce emissions so that ∂gj(lj)/∂ljnj(lj,νj)/∂ljn
(c) Determine formulas for the second-best optimal firm-specific tax rates as well as for the second-best optimal uniform tax rate.
Data from section 9.2
Step by Step Answer:
This question relates to the economics of environmental policy particularly the design of optimal taxes to regulate pollution under uncertainty To derive the optimal firmspecific tax rates and secondb...View the full answer



A Course In Environmental Economics
ISBN: 9781316866818
1st Edition
Authors: Daniel J Phaneuf, Till Requate
