

Question: DP10.1 In Figure DP10.1, two robots are shown coop erating with each other to manipulate a long shaft to insert it into the hole in
DP10.1 In Figure DP10.1, two robots are shown coop
erating with each other to manipulate a long shaft to insert it into the hole in the block resting on the table.
Long part insertion is a good example of a task that can benefit from cooperative control. The unity feed
back control system of one robot joint has the process transfer function
![]()
The specifications require a steady-state error for a unit ramp input of 0.01, and the step response has an overshoot of P O. . ≤ 5% with a settling time (with a 2% criterion) of Ts ≤ 1 s. Determine a lead-lag com
pensator that will meet the specifications, and plot the compensated responses for the ramp and step inputs. 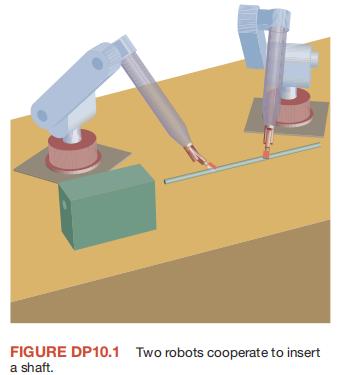
G(s)= 15 s(s+3)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts