

Question: DP11.4 A high-performance helicopter has a model shown in Figure DP11.4. The goal is to control the pitch angle ( ) t of the
DP11.4 A high-performance helicopter has a model shown in Figure DP11.4. The goal is to control the pitch angle θ( )t of the helicopter by adjusting the rotor thrust angle δ( )t . The equations of motion of the helicopter are
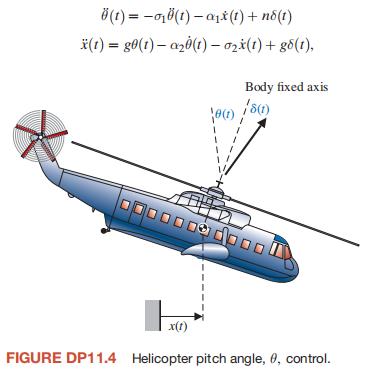
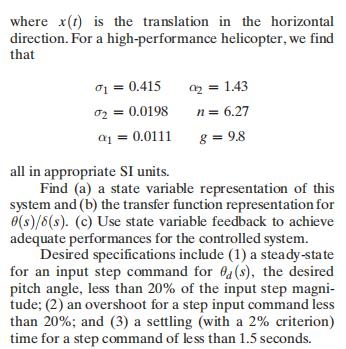
(t)=(t)-ax (1) + n(1) (t) = g(t)-a20(1) - 02x(1) + 88(1), Body fixed axis 18(1) 0(1) x(t) FIGURE DP11.4 Helicopter pitch angle, 0, control.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock