

Question: DP7.11 A pilot crane control is shown in Figure DP7.11(a). The trolley is moved by an input F t ( ) in order to control
DP7.11 A pilot crane control is shown in Figure DP7.11(a). The trolley is moved by an input F t( )
in order to control x t( ) and φ( )t [13]. The model of the pilot crane control is shown in Figure DP7.11(b).
Design a controller that will achieve zero steady-state error for ramp inputs, and maximize the closed-loop
![]()
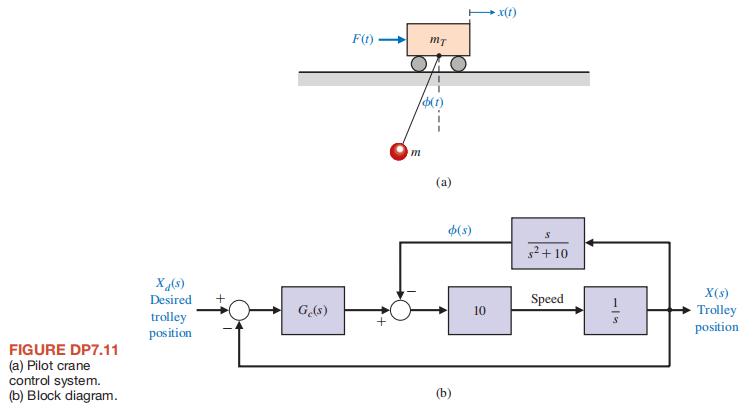
system damping when Ge(s) = K(1+ 0.25 S
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock