

Question: DP7.4 A welding torch is remotely controlled to achieve high accuracy while operating in changing and hazard ous environments [21]. A model of the welding
DP7.4 A welding torch is remotely controlled to achieve high accuracy while operating in changing and hazard
ous environments [21]. A model of the welding arm position control is shown in Figure DP7.4, with the disturbance representing the environmental changes.
(a) With T s d ( ) = 0, select K1 and K to provide high
quality performance of the position control system.
Select a set of performance criteria, and examine the results of your design.
(b) For the system in part (a), let R s( ) = 0 and determine the effect of a unit step
T s d ( ) = /1 s by obtaining y t( ). 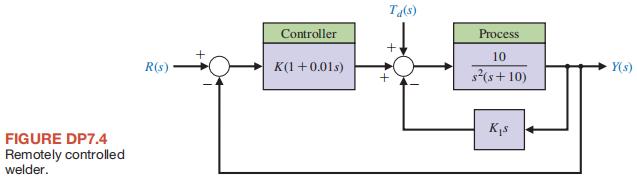
FIGURE DP7.4 Remotely controlled welder. Controller R(s) K(1+0.01s) Ta(s) Process 10 s(s+10) Ks Y(s)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts