

Question: DP7.9 A robotic arm actuated at the elbow joint is shown in Figure DP7.9(a), and the control system for the actuator is shown in Figure
DP7.9 A robotic arm actuated at the elbow joint is shown in Figure DP7.9(a), and the control system for the actuator is shown in Figure DP7.9(b). Plot the root locus for K ≥ 0. Select G s p( ) so that the steady-state error for a step input is equal to zero. Using the G s p( )
selected, plot y(t) for K equal to 1, 1.75, and 3.0. Record the rise time, settling time (with a 2% criterion), and percent overshoot for the three gains. We wish to limit the overshoot to P O. . ≤ 6% while achieving the shortest rise time possible. Select the best system for 1 ≤ ≤ K 3.0. 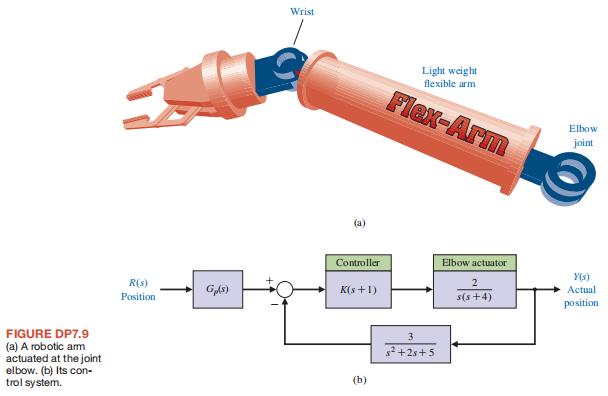
FIGURE DP7.9 (a) A robotic arm actuated at the joint elbow. (b) Its con- trol system. Wrist (a) Light weight flexible arm Flex-Arm Elbow joint Controller Elbow actuator Y(s) R(s) 2 Gls) K(s+1) Actual Position s(+4) position (b) 3 x+2x+5
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts