

Question: P7.12 A precision speed control system (Figure P7.12) is required for a platform used in gyroscope and inertial system testing where a variety of closely
P7.12 A precision speed control system (Figure P7.12) is required for a platform used in gyroscope and inertial system testing where a variety of closely controlled speeds is necessary. A direct-drive DC torque motor system was utilized to provide (1) a speed range of 0.01°/s to 600°/s, and (2) 0.1% steady-state error max
imum for a step input. The direct-drive DC torque motor avoids the use of a gear train with its attendant backlash and friction. Also, the direct-drive motor has a high-torque capability, high efficiency, and low motor time constants. The motor gain constant is nominally Km = 1.8, but is subject to variations up to 50%. The amplifier gain Ka is normally greater than 10 and subject to a variation of 10%.
(a) Determine the minimum loop gain necessary to satisfy the steady-state error requirement.
(b) Determine the limiting value of gain for stability.
(c) Sketch the root locus as Ka varies from 0 to ∞.
(d) Determine the roots when Ka = 40, and estimate the response to a step input.
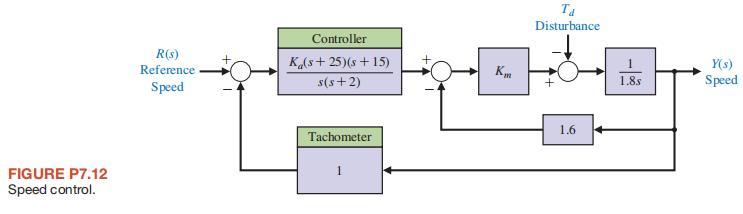
FIGURE P7.12 Speed control. R(s) Reference Speed Controller Ka(s+25)(s +15) s(s+2) Tachometer Km Ta Disturbance 1.6 1.8s Y(s) Speed
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts