

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
1) (40pts) For a two-joint manipulator, its DH parameter table is as follows: ai di ai Di ; Fo F F1 F2 1 1
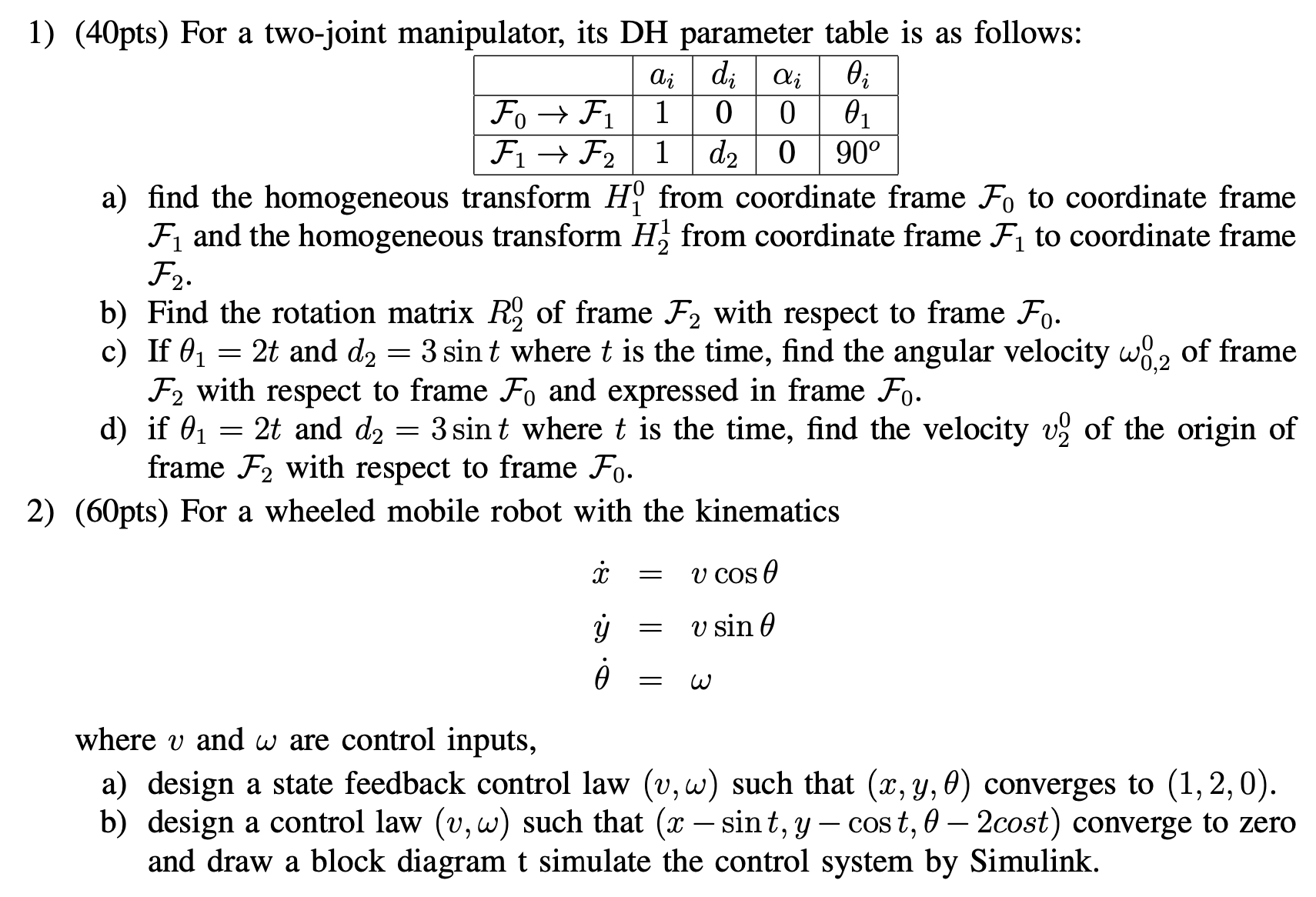
1) (40pts) For a two-joint manipulator, its DH parameter table is as follows: ai di ai Di ; Fo F F1 F2 1 1 0 0 01 d 0 90 a) find the homogeneous transform H from coordinate frame Fo to coordinate frame F and the homogeneous transform H from coordinate frame F to coordinate frame F2. b) Find the rotation matrix R2 of frame F2 with respect to frame Fo. c) If = 2t and d = 3 sint where t is the time, find the angular velocity w02 of frame 01 F2 with respect to frame Fo and expressed in frame Fo. d) if 01 = 2t and d = 3 sint where t is the time, find the velocity v2 of the origin of frame F2 with respect to frame Fo. 2) (60pts) For a wheeled mobile robot with the kinematics x = v cos 0 == v sin = where v and w are control inputs, a) design a state feedback control law (v, w) such that (x, y, 0) converges to (1,2,0). b) design a control law (v, w) such that (x - sint, y - cost, 0 - 2 cost) converge to zero and draw a block diagram t simulate the control system by Simulink.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Ethics for Scientists and Engineers
Authors: Edmund G. Seebauer, Robert L. Barry
1st Edition
9780195698480, 195134885, 195698487, 978-0195134889