

1. A 2-DOF planar robot manipulator is shown in the figure below. At a configuration of the manipulator, when a force = [] is
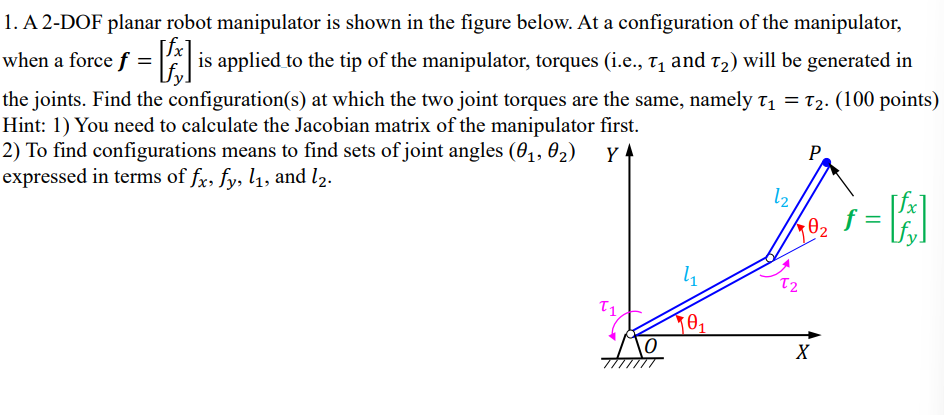
1. A 2-DOF planar robot manipulator is shown in the figure below. At a configuration of the manipulator, when a force = [] is applied to the tip of the manipulator, torques (i.e., T and 1) will be generated in 2) the joints. Find the configuration(s) at which the two joint torques are the same, namely T = T. (100 points) Hint: 1) You need to calculate the Jacobian matrix of the manipulator first. 2) To find configurations means to find sets of joint angles (0, 02) Y expressed in terms of fx, fy, l, and l. T1, 4 10 12 P 10 T2 X f -[x] =
Step by Step Solution
There are 3 Steps involved in it
Step: 1

See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Authors: James M. Gere, Barry J. Goodno
7th edition
495438073, 978-0495438076