

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
1. A certain 2DOF manipulator has the following Jacobian: D [-L1S1-L2S12 L1C1 + L2C12 -L2S12] L2C12 a) Ignoring gravity, what are the joint torques
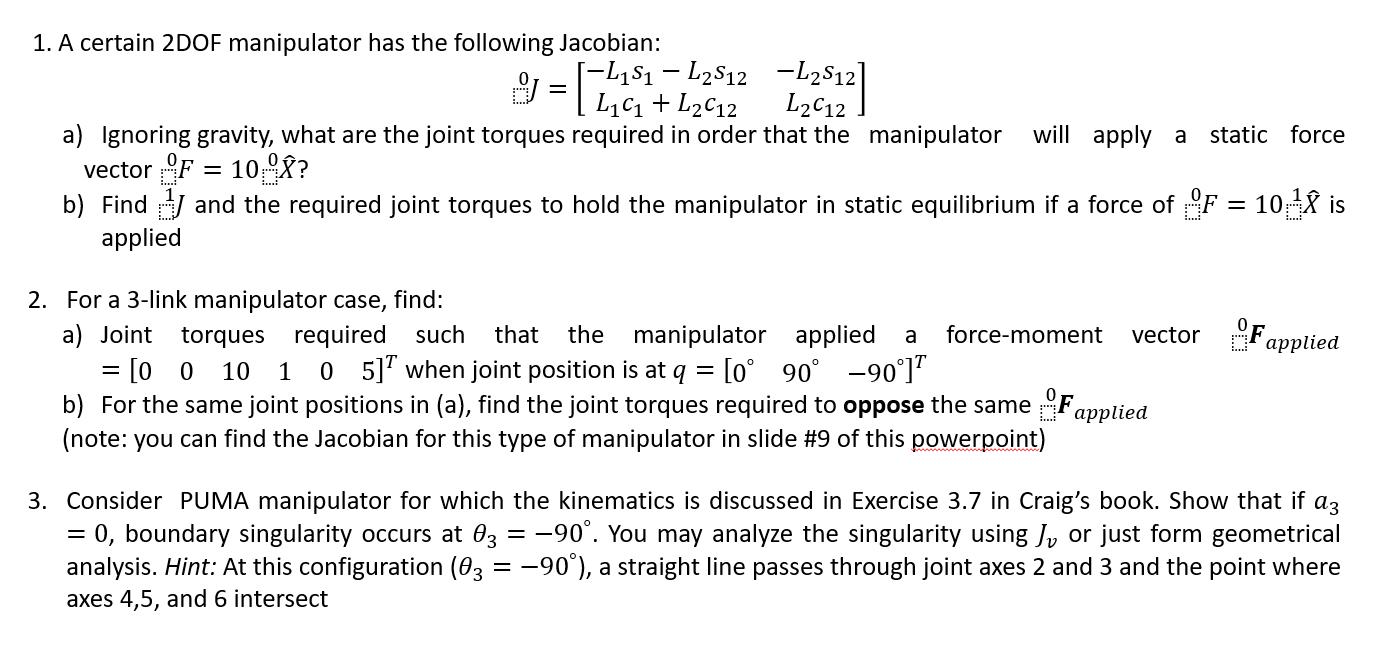
1. A certain 2DOF manipulator has the following Jacobian: D [-L1S1-L2S12 L1C1 + L2C12 -L2S12] L2C12 a) Ignoring gravity, what are the joint torques required in order that the manipulator will apply a static force vector F = 10? b) Find and the required joint torques to hold the manipulator in static equilibrium if a force of F = 10 is applied = 2. For a 3-link manipulator case, find: a) Joint torques required such that the manipulator applied = [0_0 10 1 0 5] when joint position is at q - = [0 90-90] b) For the same joint positions in (a), find the joint torques required to oppose the same (note: you can find the Jacobian for this type of manipulator in slide #9 of this powerpoint) a force-moment vector Fapplied applied 3. Consider PUMA manipulator for which the kinematics is discussed in Exercise 3.7 in Craig's book. Show that if a3 = 0, boundary singularity occurs at 03 = -90. You may analyze the singularity using J, or just form geometrical analysis. Hint: At this configuration (03 = 90), a straight line passes through joint axes 2 and 3 and the point where axes 4,5, and 6 intersect
Step by Step Solution
★★★★★
3.59 Rating (163 Votes )
There are 3 Steps involved in it
Step: 1
a To find the joint torques required to apply a static force vector F F1 F2 we can use the Jacobian matrix J and the equation JT F Where is the joint ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Income Tax Fundamentals 2013
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
31st Edition
1111972516, 978-1285586618, 1285586611, 978-1285613109, 978-1111972516