

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
1. Consider a robotic cart that tries to balance a pendulum at the vertical position by appropriate control u as shown in Figure 1.
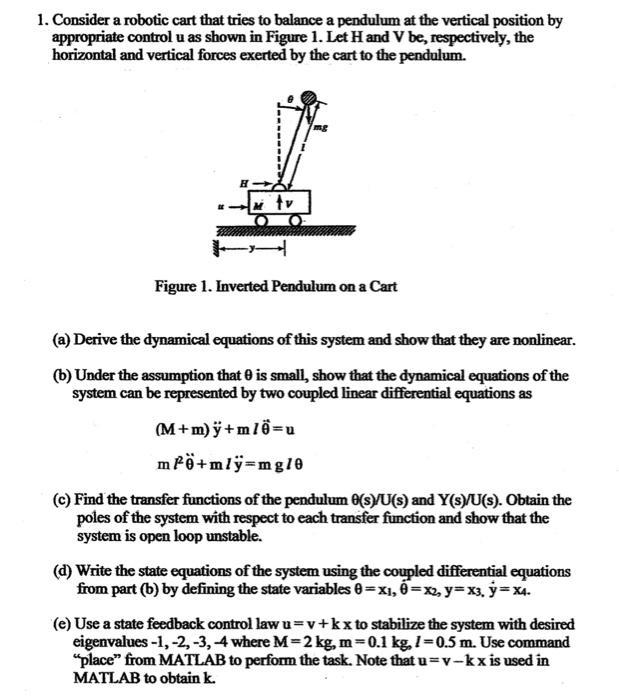
1. Consider a robotic cart that tries to balance a pendulum at the vertical position by appropriate control u as shown in Figure 1. Let H and V be, respectively, the horizontal and vertical forces exerted by the cart to the pendulum. H-> M tv OO Figure 1. Inverted Pendulum on a Cart (a) Derive the dynamical equations of this system and show that they are nonlinear. (b) Under the assumption that is small, show that the dynamical equations of the system can be represented by two coupled linear differential equations as (M+m) + m l=u mf+mly-mg10 (c) Find the transfer functions of the pendulum 0(s)/U(s) and Y(s)/U(s). Obtain the poles of the system with respect to each transfer function and show that the system is open loop unstable. (d) Write the state equations of the system using the coupled differential equations from part (b) by defining the state variables 0=x1, 6=x2, y=x3, y=x4. (e) Use a state feedback control law u=v+kx to stabilize the system with desired eigenvalues -1, -2, -3, -4 where M-2 kg, m=0.1 kg, 1=0.5 m. Use command "place" from MATLAB to perform the task. Note that u=v-k x is used in MATLAB to obtain k.
Step by Step Solution
★★★★★
3.58 Rating (158 Votes )
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Control Systems Engineering
Authors: Norman S. Nise
7th Edition
1118170512, 978-1118170519