

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
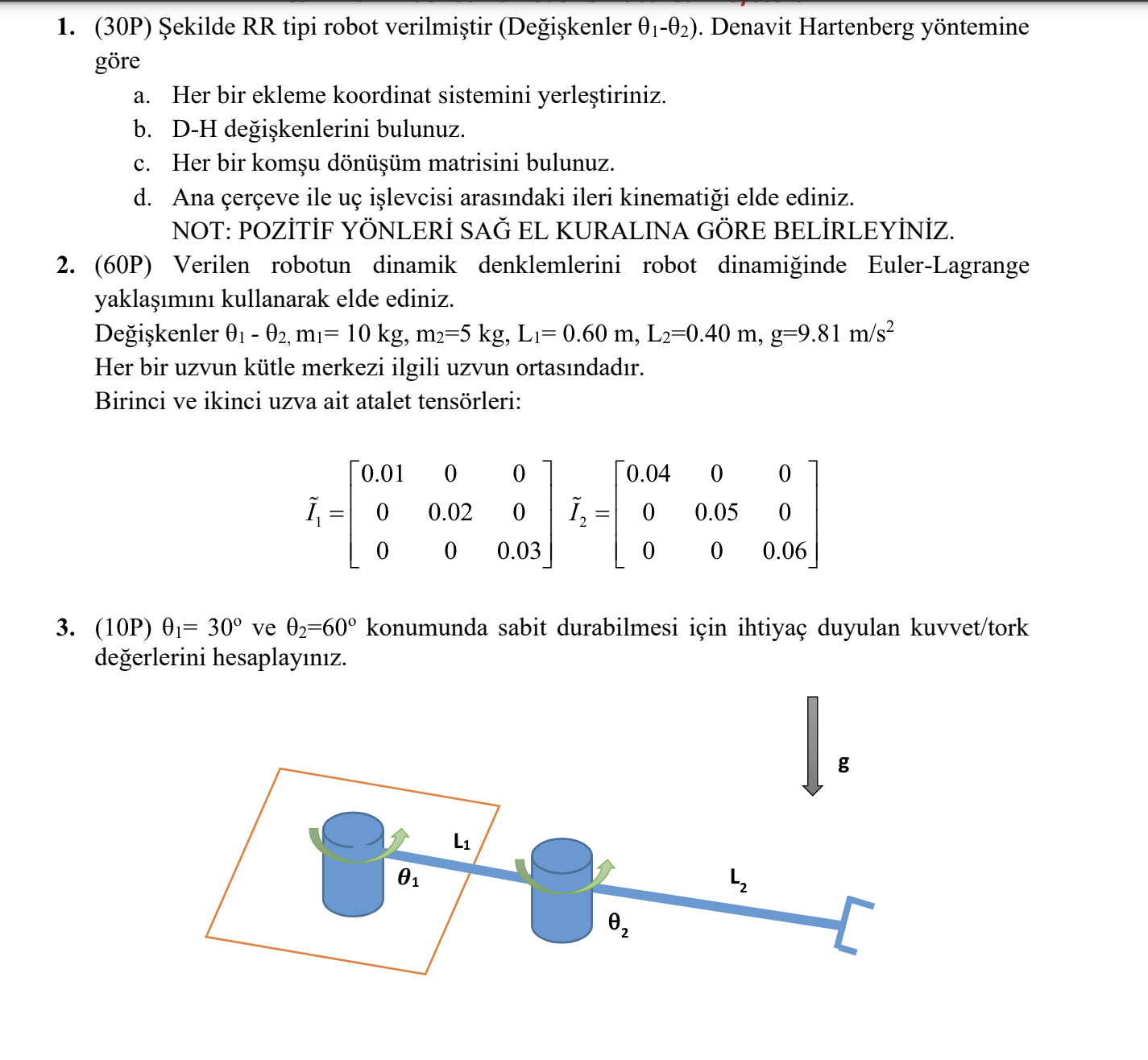
1 . The RR type robot is given in the figure ( Variables Q 1 - Q 2 ) . Denavit Hartenberg method According to
The RR type robot is given in the figure Variables QQ Denavit Hartenberg method
According to
a Place the coordinate system in each joint.
b Find the DH variables.
c Find each adjacent transformation matrix.
d Obtain the forward kinematics between the main frame and the endfunction.
NOTE: Determine the positive directions according to the LEFT HAND RULE.
Find the dynamic equations of the given robot using the EulerLagrange
Obtain using the approximation.
Variables Q Q m kg m kg L m L m g ms
The center of mass of each limb is at the center of the respective limb
Inertia tensors of the first and second limb:
Forcetorque required for to stand still at Qdeg and Qdeg
Calculate the values.
Please write the nd and rd question
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Database Management
Authors: Donald A. Carpenter Fred R. McFadden
1st Edition
8178088045, 978-8178088044