

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
1 Vectored Thrust Aircraft The purpose of this question is to show that the LQG controller (LQR combined with opti- mal observer/estimator) guarantees attaining
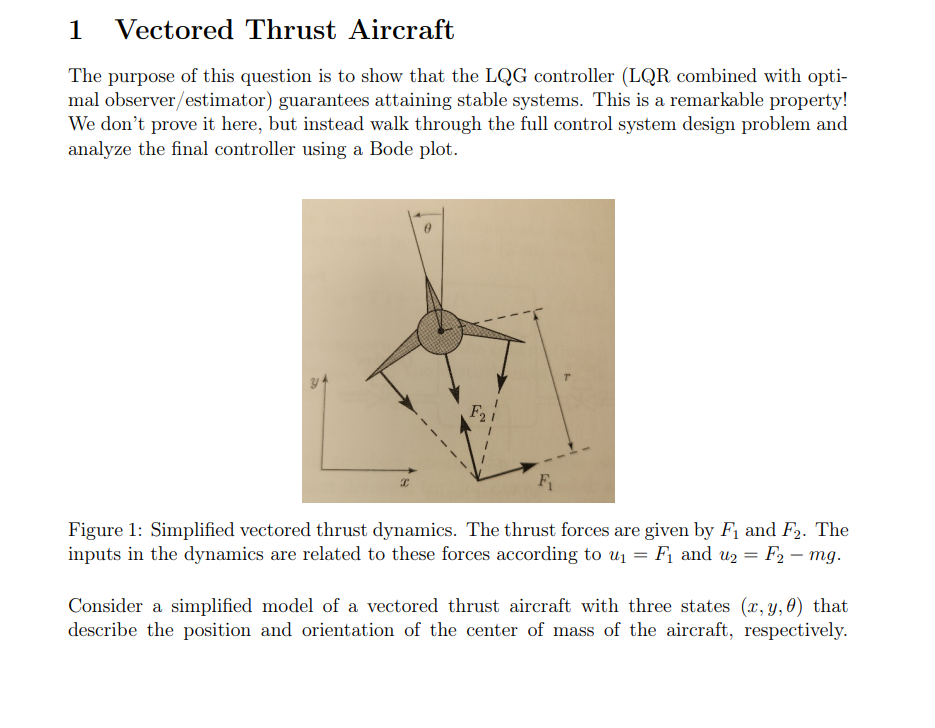
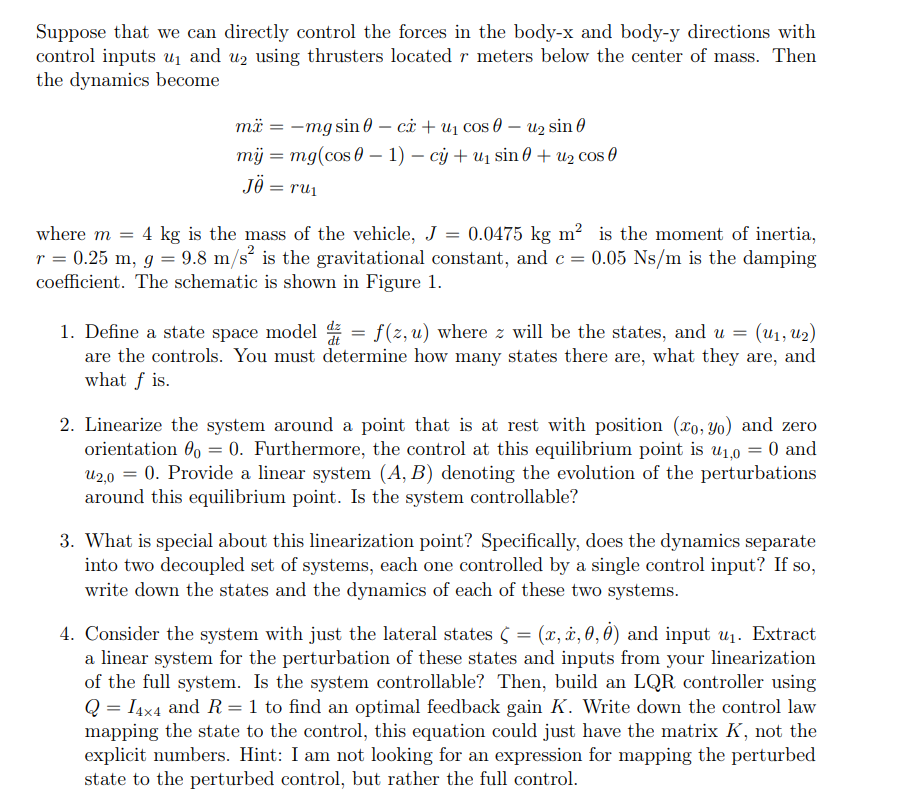
1 Vectored Thrust Aircraft The purpose of this question is to show that the LQG controller (LQR combined with opti- mal observer/estimator) guarantees attaining stable systems. This is a remarkable property! We don't prove it here, but instead walk through the full control system design problem and analyze the final controller using a Bode plot. Figure 1: Simplified vectored thrust dynamics. The thrust forces are given by F and F2. The inputs in the dynamics are related to these forces according to u = F and u2 = F2 mg. - Consider a simplified model of a vectored thrust aircraft with three states (x, y, 0) that describe the position and orientation of the center of mass of the aircraft, respectively. Suppose that we can directly control the forces in the body-x and body-y directions with control inputs u and u using thrusters located r meters below the center of mass. Then the dynamics become where m = mx = -mg sin - cx+u cos 0 - u sin mimg(cos 0 1) - c + u sin 0 + u cos J = ru - 4 kg is the mass of the vehicle, J = 0.0475 kg m2 is the moment of inertia, r = 0.25 m, g = 9.8 m/s is the gravitational constant, and c = 0.05 Ns/m is the damping coefficient. The schematic is shown in Figure 1. 1. Define a state space model d = f(z, u) where z will be the states, and u = (U1, U2) are the controls. You must determine how many states there are, what they are, and what f is. 2. Linearize the system around a point that is at rest with position (xo, yo) and zero orientation = 0. Furthermore, the control at this equilibrium point is u1,0 = 0 and u2,0 = 0. Provide a linear system (A, B) denoting the evolution of the perturbations around this equilibrium point. Is the system controllable? 3. What is special about this linearization point? Specifically, does the dynamics separate into two decoupled set of systems, each one controlled by a single control input? If so, write down the states and the dynamics of each of these two systems. 4. Consider the system with just the lateral states ( = (x, x, 0, 0) and input u. Extract a linear system for the perturbation of these states and inputs from your linearization of the full system. Is the system controllable? Then, build an LQR controller using Q = 144 and R = 1 to find an optimal feedback gain K. Write down the control law mapping the state to the control, this equation could just have the matrix K, not the explicit numbers. Hint: I am not looking for an expression for mapping the perturbed state to the perturbed control, but rather the full control.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Ethics for Scientists and Engineers
Authors: Edmund G. Seebauer, Robert L. Barry
1st Edition
9780195698480, 195134885, 195698487, 978-0195134889