

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
1. Work through, code up and show the results of example 6.1 from the textbook. Show, discuss, and comment on all intermediate steps. Explicitly

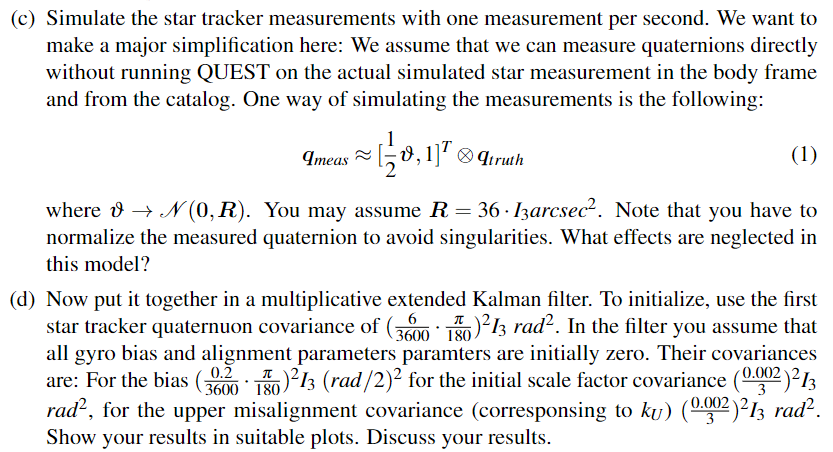
1. Work through, code up and show the results of example 6.1 from the textbook. Show, discuss, and comment on all intermediate steps. Explicitly name the update, propagation, update, and reset step. Note: Only the filter part is needed, you can ignore the smoother part. The details and individual parts of the problem are the following: (c) Simulate the star tracker measurements with one measurement per second. We want to make a major simplification here: We assume that we can measure quaternions directly without running QUEST on the actual simulated star measurement in the body frame and from the catalog. One way of simulating the measurements is the following: 1 Imeas [0,1] Itruth (1) where N(0,R). You may assume R = 3613arcsec. Note that you have to normalize the measured quaternion to avoid singularities. What effects are neglected in this model? (d) Now put it together in a multiplicative extended Kalman filter. To initialize, use the first star tracker quaternuon covariance of (3600 1880)13 rad. In the filter you assume that all gyro bias and alignment parameters paramters are initially zero. Their covariances are: For the bias (300 180) 213 (rad/2) for the initial scale factor covariance (0.002) 213 rad, for the upper misalignment covariance (corresponsing to ku) (0.002)13 rad. Show your results in suitable plots. Discuss your results.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Engineering Mechanics Statics
Authors: R. C. Hibbeler
12th Edition
136077900, 978-0136077909