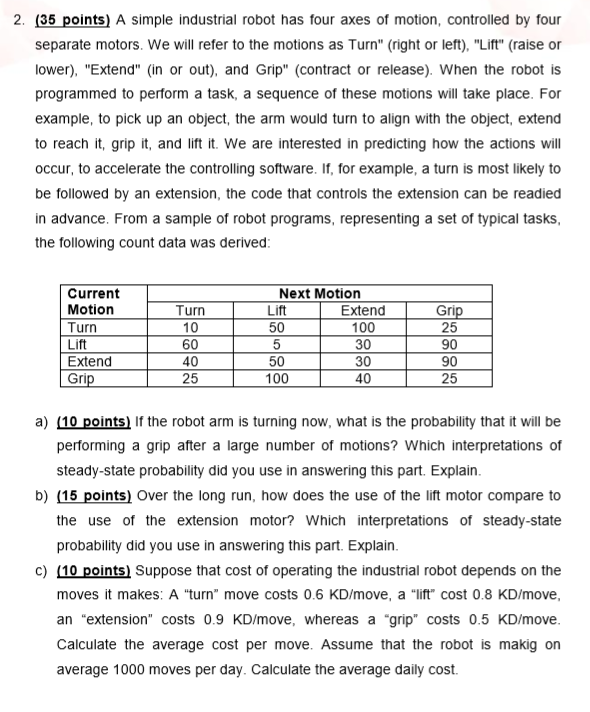
2. (35 points) A simple industrial robot has four axes of motion, controlled by four separate motors. We will refer to the motions as Turn" (right or left), "Lift" (raise or lower), "Extend" (in or out), and Grip" (contract or release). When the robot is programmed to perform a task, a sequence of these motions will take place. For example, to pick up an object, the arm would turn to align with the object, extend to reach it, grip it, and lift it. We are interested in predicting how the actions will occur, to accelerate the controlling software. If, for example, a turn is most likely to be followed by an extension, the code that controls the extension can be readied in advance. From a sample of robot programs, representing a set of typical tasks, the following count data was derived: Current Motion Turn Lift Extend Grip Turn 10 60 40 Next Motion Lift Extend 50 100 5 30 50 30 100 Grip 25 90 90 25 40 25 a) (10 points) If the robot arm is turning now, what is the probability that it will be performing a grip after a large number of motions? Which interpretations of steady-state probability did you use in answering this part. Explain. b) (15 points) Over the long run, how does the use of the lift motor compare to the use of the extension motor? Which interpretations of steady-state probability did you use in answering this part. Explain. C) (10 points) Suppose that cost of operating the industrial robot depends on the moves it makes: A "turn" move costs 0.6 KD/move, a "lift" cost 0.8 KD/move, an "extension" costs 0.9 KD/move, whereas a grip costs 0.5 KD/move. Calculate the average cost per move. Assume that the robot is makig on average 1000 moves per day. Calculate the average daily cost. 2. (35 points) A simple industrial robot has four axes of motion, controlled by four separate motors. We will refer to the motions as Turn" (right or left), "Lift" (raise or lower), "Extend" (in or out), and Grip" (contract or release). When the robot is programmed to perform a task, a sequence of these motions will take place. For example, to pick up an object, the arm would turn to align with the object, extend to reach it, grip it, and lift it. We are interested in predicting how the actions will occur, to accelerate the controlling software. If, for example, a turn is most likely to be followed by an extension, the code that controls the extension can be readied in advance. From a sample of robot programs, representing a set of typical tasks, the following count data was derived: Current Motion Turn Lift Extend Grip Turn 10 60 40 Next Motion Lift Extend 50 100 5 30 50 30 100 Grip 25 90 90 25 40 25 a) (10 points) If the robot arm is turning now, what is the probability that it will be performing a grip after a large number of motions? Which interpretations of steady-state probability did you use in answering this part. Explain. b) (15 points) Over the long run, how does the use of the lift motor compare to the use of the extension motor? Which interpretations of steady-state probability did you use in answering this part. Explain. C) (10 points) Suppose that cost of operating the industrial robot depends on the moves it makes: A "turn" move costs 0.6 KD/move, a "lift" cost 0.8 KD/move, an "extension" costs 0.9 KD/move, whereas a grip costs 0.5 KD/move. Calculate the average cost per move. Assume that the robot is makig on average 1000 moves per day. Calculate the average daily cost