

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
2 {s} rod 1 h (s) La xa (ba) (Zero Position) rod 2 m2 (b) (Zero Position) Figure. 2R rotational inverted pendulum (left); and
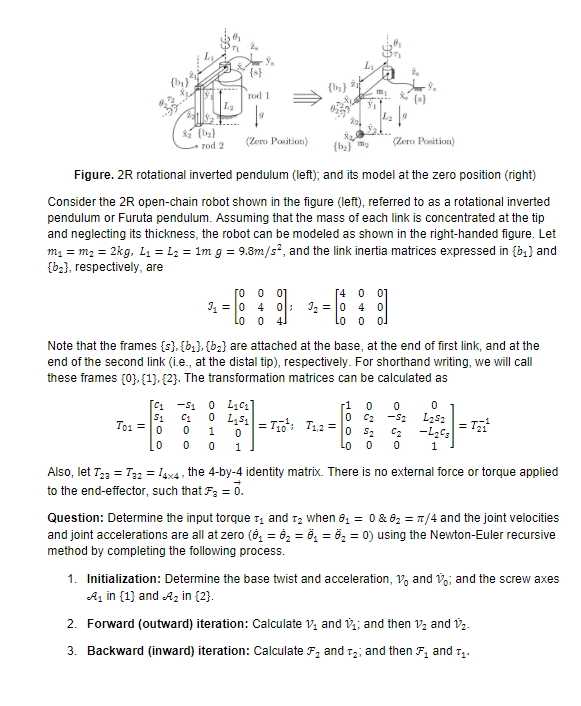
2 {s} rod 1 h (s) La xa (ba) (Zero Position) rod 2 m2 (b) (Zero Position) Figure. 2R rotational inverted pendulum (left); and its model at the zero position (right) Consider the 2R open-chain robot shown in the figure (left), referred to as a rotational inverted pendulum or Furuta pendulum. Assuming that the mass of each link is concentrated at the tip and neglecting its thickness, the robot can be modeled as shown in the right-handed figure. Let m = m = 2kg, L = L = 1mg = 9.8m/s, and the link inertia matrices expressed in {b) and {b}, respectively, are 01 = 0 4 0; Lo 0 4J [400] 2040 Lo 0 0 Note that the frames (s), (b), (b) are attached at the base, at the end of first link, and at the end of the second link (i.e., at the distal tip), respectively. For shorthand writing, we will call these frames (0},{1}, {2}. The transformation matrices can be calculated as 1 S1 To10 0 5500 S10 L] 0 L = 1 0 0 1 r1 0 0 0 C -52 0 $2 C2 0 L252 Tz -LCs Lo 0 0 1 Also, let 723 = T32 = 14x4, the 4-by-4 identity matrix. There is no external force or torque applied to the end-effector, such that F = 0. Question: Determine the input torque and when 6 = 0 & 6 = /4 and the joint velocities and joint accelerations are all at zero ( = 6 = = = 0) using the Newton-Euler recursive method by completing the following process. 1. Initialization: Determine the base twist and acceleration, V, and Vo; and the screw axes A in (1) and A in {2}. 2. Forward (outward) iteration: Calculate and ; and then V and v. 3. Backward (inward) iteration: Calculate F and 2; and then F and T.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Control Systems Engineering
Authors: Norman S. Nise
7th Edition
1118170512, 978-1118170519