

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
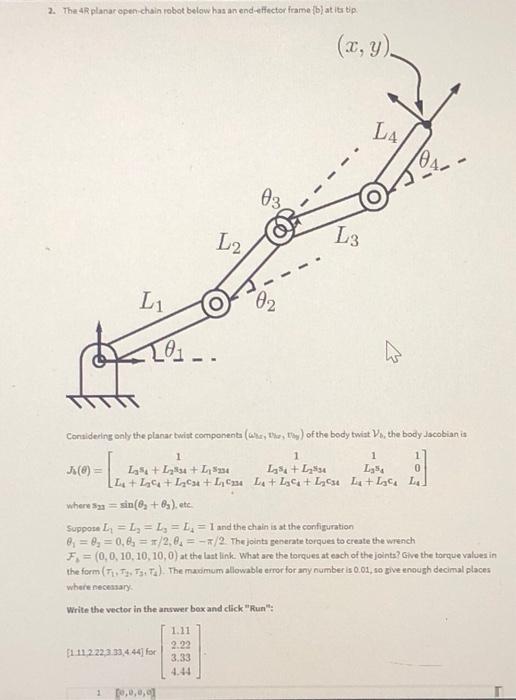
2. Tha 4R planar open-chain robot below has an end-effector frame ib at its tip. where sin2=sin(2+3), etc. Suppote I1=I2=I3=I4=1 and the chain is at
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Vector Mechanics for Engineers Statics and Dynamics
Authors: Ferdinand Beer, E. Russell Johnston, Jr., Elliot Eisenberg, William Clausen, David Mazurek, Phillip Cornwell
8th Edition
73212229, 978-0073212227