

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
4. Use MATLAB to calculate the robot end-effector's position, i.e., the origin of the coordinate frame 6 of the robot, for the following joint
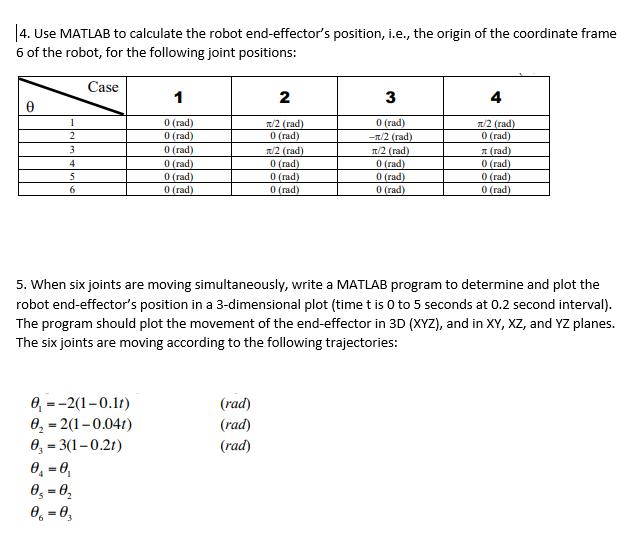
4. Use MATLAB to calculate the robot end-effector's position, i.e., the origin of the coordinate frame 6 of the robot, for the following joint positions: 0 1 2 3 4 5 6 Case 0 = -2(1-0.11) 0=2(1-0.041) 0,=3(1-0.21) 0-0 0-0 06-03 = 1 0 (rad) 0 (rad) 0 (rad) 0 (rad) 0 (rad) 0 (rad) 2 (rad) (rad) (rad) /2 (rad) 0 (rad) /2 (rad) 0 (rad) 0 (rad) 0 (rad) 3 0 (rad) -/2 (rad) 5. When six joints are moving simultaneously, write a MATLAB program to determine and plot the robot end-effector's position in a 3-dimensional plot (time t is 0 to 5 seconds at 0.2 second interval). The program should plot the movement of the end-effector in 3D (XYZ), and in XY, XZ, and YZ planes. The six joints are moving according to the following trajectories: r/2 (rad) 0 (rad) 0 (rad) 0 (rad) 4 /2 (rad) 0 (rad) (rad) 0 (rad) 0 (rad) 0 (rad)
Step by Step Solution
★★★★★
3.42 Rating (155 Votes )
There are 3 Steps involved in it
Step: 1
To calculate the robot endeffectors position for the given joint positions using MATLAB we need to know the DenavitHartenberg DH parameters and the transformation matrices between consecutive frames o...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Matlab An Introduction with Applications
Authors: Amos Gilat
5th edition
1118629868, 978-1118801802, 1118801806, 978-1118629864