

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
5 (a) Consider the figure on the left below showing four different configurations of a 2R robot relative to two triangular obstacles. The figure
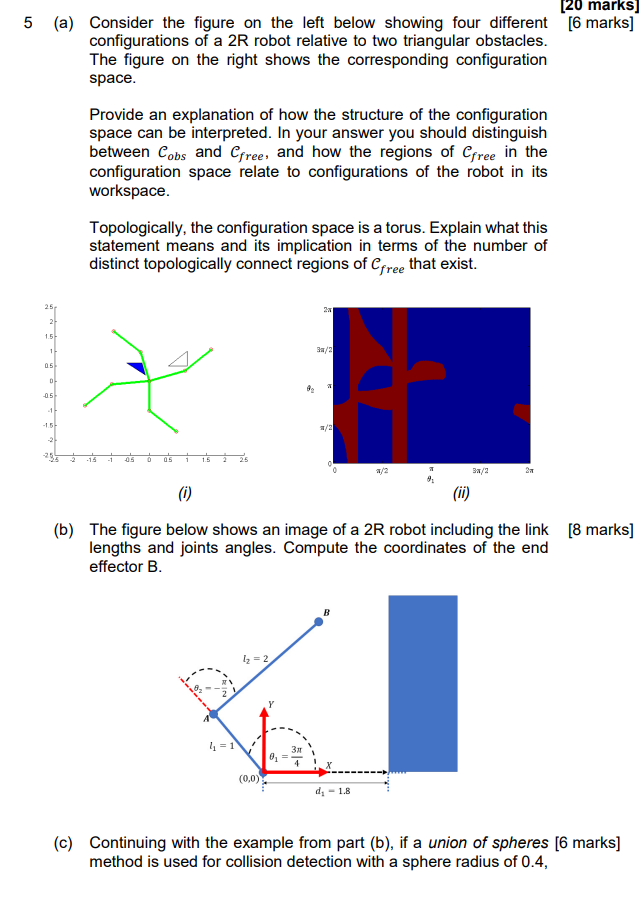
5 (a) Consider the figure on the left below showing four different configurations of a 2R robot relative to two triangular obstacles. The figure on the right shows the corresponding configuration space. Provide an explanation of how the structure of the configuration space can be interpreted. In your answer you should distinguish between Cobs and Cfree, and how the regions of Cfree in the configuration space relate to configurations of the robot in its workspace. Topologically, the configuration space is a torus. Explain what this statement means and its implication in terms of the number of distinct topologically connect regions of Cfree that exist. [20 marks] [6 marks] 25 2 1.5 15 05 -0.5k 1- -1.5k -2 235 2 -15 -1 05 0 05 1.5 25 (i) 2x 3/2 3/2 3/2 2 (ii) (b) The figure below shows an image of a 2R robot including the link [8 marks] lengths and joints angles. Compute the coordinates of the end effector B. 12=2 4-1 0 = (0,0) d = 1.8 (c) Continuing with the example from part (b), if a union of spheres [6 marks] method is used for collision detection with a sphere radius of 0.4,
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Entrepreneurship
Authors: Andrew Zacharakis, William D Bygrave
5th Edition
1119563097, 9781119563099