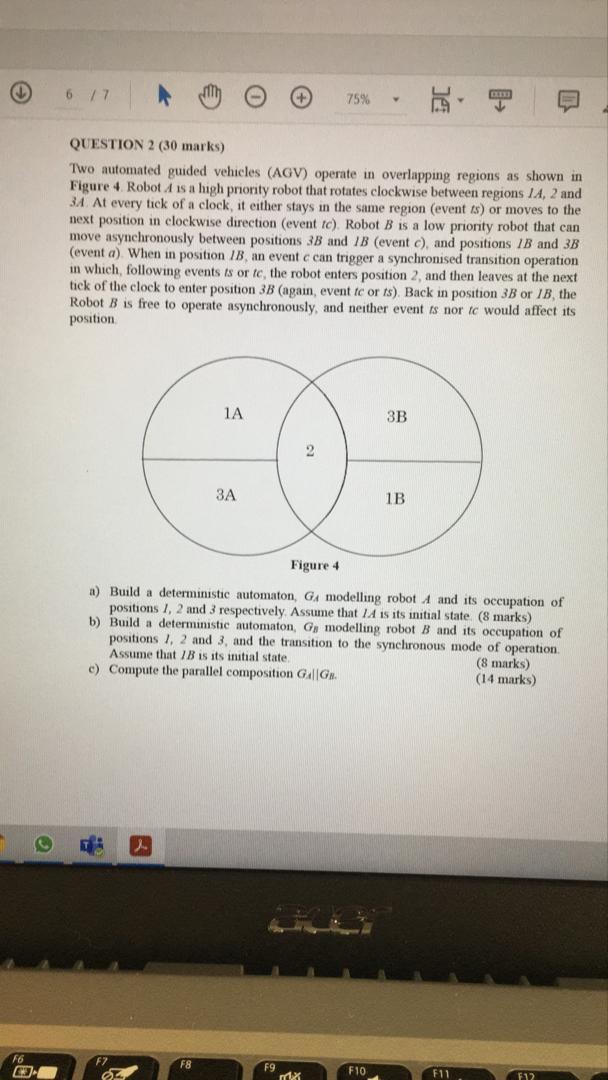
6 77 75% QUESTION 2 (30 marks) Two automated guided vehicles (AGV) operate in overlapping regions as shown in Figure 4 Robot A is a high priority robot that rotates clockwise between regions 1A, 2 and 34. At every tick of a clock, it either stays in the same region (event ts) or moves to the next position in clockwise direction (event tc). Robot B is a low priority robot that can move asynchronously between positions 3B and IB (event e), and positions IB and 3B (event a) When in position 1B, an event e can trigger a synchronised transition operation in which, following events is or tc, the robot enters position 2, and then leaves at the next tick of the clock to enter position 3B (again, event te or is). Back in position 3B or 1B, the Robot B is free to operate asynchronously, and neither event is nor tc would affect its position 1A 2 1B Figure 4 a) Build a deterministic automaton, GA modelling robot A and its occupation of positions 1, 2 and 3 respectively. Assume that 14 is its initial state (8 marks) b) Build a deterministie automaton, G, modelling robot B and its occupation of positions 1, 2 and 3, and the transition to the synchronous mode of operation Assume that IB is its initial state, (8 marks) c) Compute the parallel composition GG. (14 marks) F6 F2 OL F9 mx F10 F11 712 6 77 75% QUESTION 2 (30 marks) Two automated guided vehicles (AGV) operate in overlapping regions as shown in Figure 4 Robot A is a high priority robot that rotates clockwise between regions 1A, 2 and 34. At every tick of a clock, it either stays in the same region (event ts) or moves to the next position in clockwise direction (event tc). Robot B is a low priority robot that can move asynchronously between positions 3B and IB (event e), and positions IB and 3B (event a) When in position 1B, an event e can trigger a synchronised transition operation in which, following events is or tc, the robot enters position 2, and then leaves at the next tick of the clock to enter position 3B (again, event te or is). Back in position 3B or 1B, the Robot B is free to operate asynchronously, and neither event is nor tc would affect its position 1A 2 1B Figure 4 a) Build a deterministic automaton, GA modelling robot A and its occupation of positions 1, 2 and 3 respectively. Assume that 14 is its initial state (8 marks) b) Build a deterministie automaton, G, modelling robot B and its occupation of positions 1, 2 and 3, and the transition to the synchronous mode of operation Assume that IB is its initial state, (8 marks) c) Compute the parallel composition GG. (14 marks) F6 F2 OL F9 mx F10 F11 712