

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
A 4-DOF robot arm was shown in the figure 1. For this robot: a) Assign coordinate frames based on the D-H representation. b) Fill
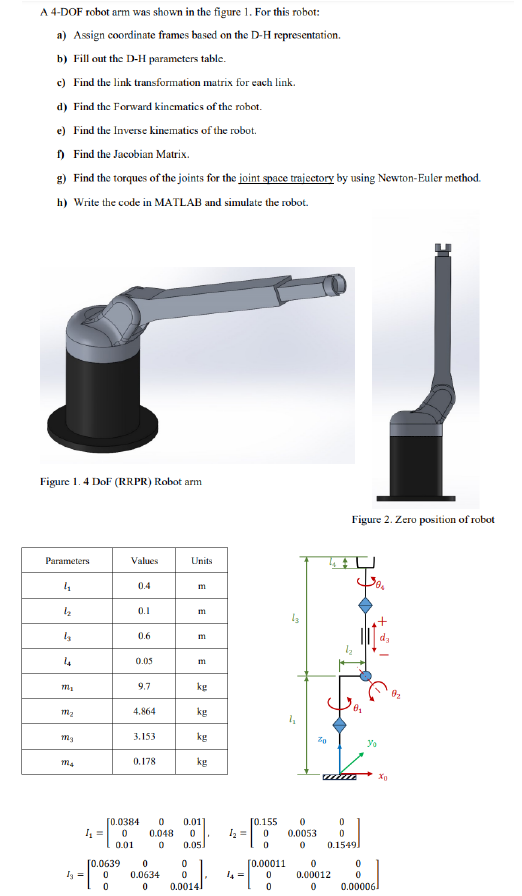
A 4-DOF robot arm was shown in the figure 1. For this robot: a) Assign coordinate frames based on the D-H representation. b) Fill out the D-H parameters table. c) Find the link transformation matrix for each link. d) Find the Forward kinematics of the robot. e) Find the Inverse kinematics of the robot. f) Find the Jacobian Matrix. g) Find the torques of the joints for the joint space trajectory by using Newton-Euler method. h) Write the code in MATLAB and simulate the robot. Figure 1. 4 DoF (RRPR) Robot arm Parameters Values Units 4 0.4 m .. 0.1 m 13 0.6 m 4 0.05 m m 9.7 kg ma 4.864 kg mg 3.153 kg ma 0.178 kg Figure 2. Zero position of robot [0.0384 0 0.01 [0.155 0 0 4 = 0 0.048 0 1 = 0 0.0053 0 0.01 0 0.05 0 0 0.1549 [0.0639 0 0 [0.00011 0 Ig= 0 0.0634 0 44= 0 0.00012 0 0 0 0.0014] 0 0 0.00006 Xo
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Shigleys Mechanical Engineering Design
Authors: Richard G. Budynas, J. Keith Nisbett
9th edition
77679520, 73529281, 1259986241, 978-0077679521, 9780073529288, 9781259986246, 978-1121345317