

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
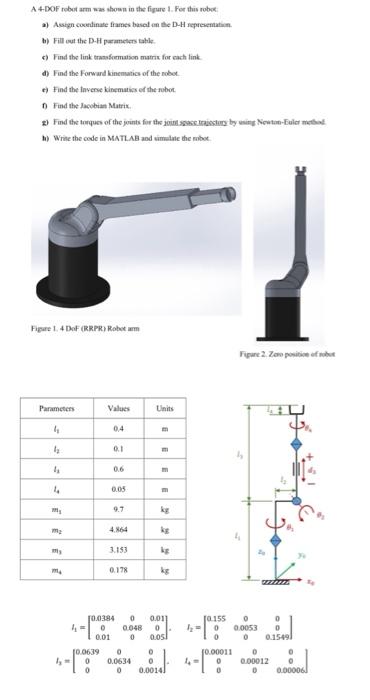
A 4-DOF robot arm was shown in the figure 1. For this robot: Assign coordinate frames based on the D-H representation. Fill out the D-H
A 4-DOF robot arm was shown in the figure 1. For this robot:
- Assign coordinate frames based on the D-H representation.
- Fill out the D-H parameters table.
- Find the link transformation matrix for each link.
- Find the Forward kinematics of the robot.
- Find the Inverse kinematics of the robot.
- Find the Jacobian Matrix.
- Find the torques of the joints for the joint space trajectory by using Newton-Euler method.
- Write the code in MATLAB and simulate the robot.
A 4-DOF robot arm was shown in the figure 1. For this robot a) Assign coordinate frames based on the D-H representation b) Fill out the D-H parameters table.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Essentials of Materials Science and Engineering
Authors: Donald R. Askeland, Wendelin J. Wright
3rd edition
978-1111576868, 1111576866, 978-1285677620, 1285677625, 978-1111576851