

A DC motor and a speed reducer transmission needs to be designed to power a hip joint of a robot as shown below. You
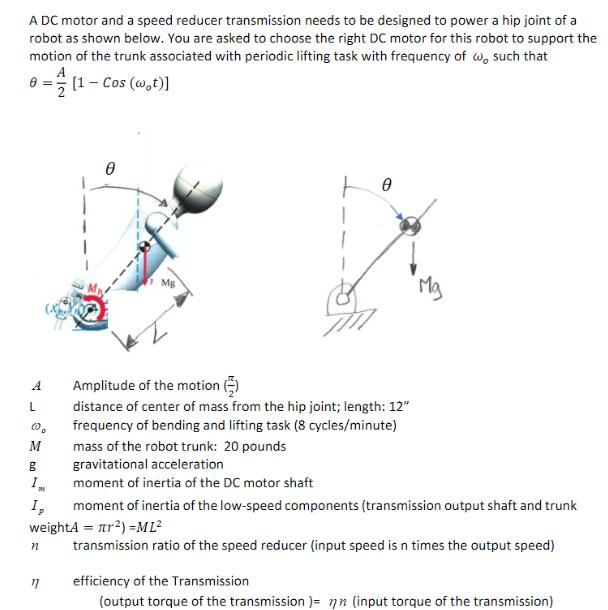

A DC motor and a speed reducer transmission needs to be designed to power a hip joint of a robot as shown below. You are asked to choose the right DC motor for this robot to support the motion of the trunk associated with periodic lifting task with frequency of @, such that 8 = [1 - Cos (w t)] L M g Im Ip 72 0 77 Mg Amplitude of the motion () distance of center of mass from the hip joint; length: 12" frequency of bending and lifting task (8 cycles/minute) moment of inertia of the low-speed components (transmission output shaft and trunk weightA= r) =ML transmission ratio of the speed reducer (input speed is n times the output speed) mass of the robot trunk: 20 pounds gravitational acceleration moment of inertia of the DC motor shaft efficiency of the Transmission (output torque of the transmission )= nn (input torque of the transmission) 1) Derive an equation for the required torque for the DC motor at the hip. 2) Assuming n=9, n = 0.8, 1m = negligible, plot the required a torque speed curve representing this maneuver.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Authors: Richard C. Dorf, Robert H. Bishop
12th edition
136024580, 978-0136024583