

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
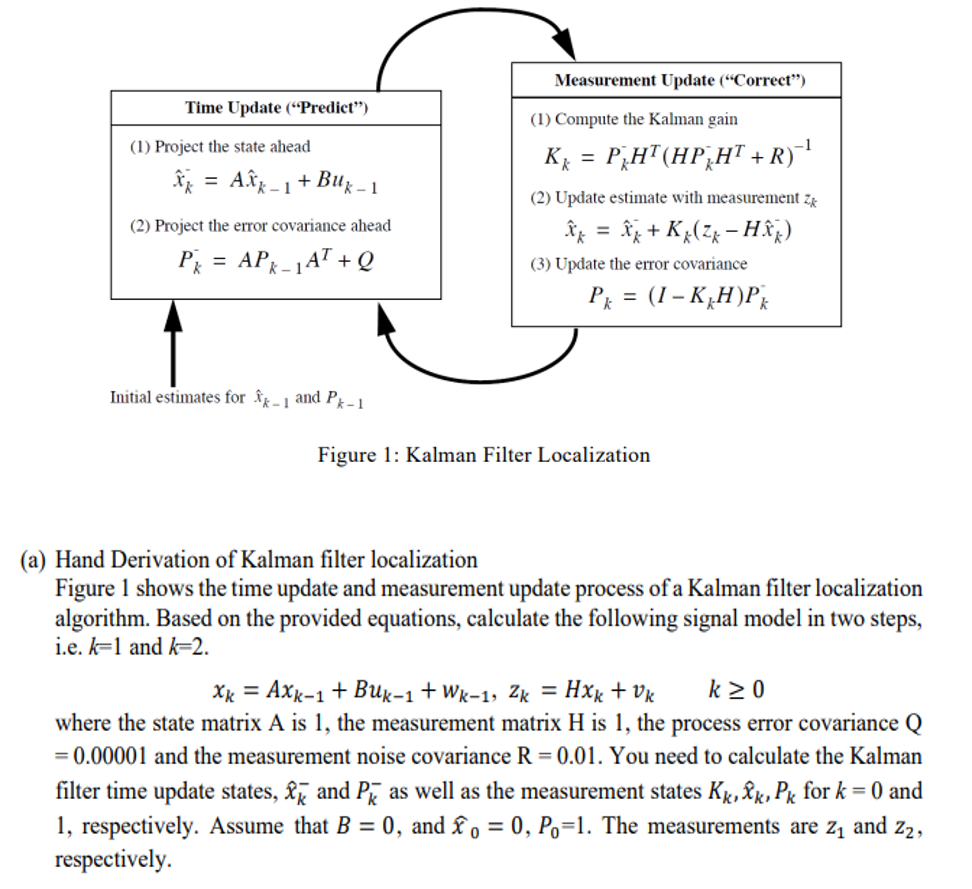
( a ) Hand Derivation of Kalman filter localization Figure 1 shows the time update and measurement update process of a Kalman filter localization algorithm.
a Hand Derivation of Kalman filter localization
Figure shows the time update and measurement update process of a Kalman filter localization
algorithm. Based on the provided equations, calculate the following signal model in two steps,
ie and
where the state matrix is the measurement matrix is the process error covariance
and the measurement noise covariance You need to calculate the Kalman
filter time update states, hatand as well as the measurement states hat for and
respectively. Assume that and widehat The measurements are and
respectively.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Reliability Engineering Designing And Operating Resilient Database Systems
Authors: Laine Campbell, Charity Majors
1st Edition
978-1491925942