

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
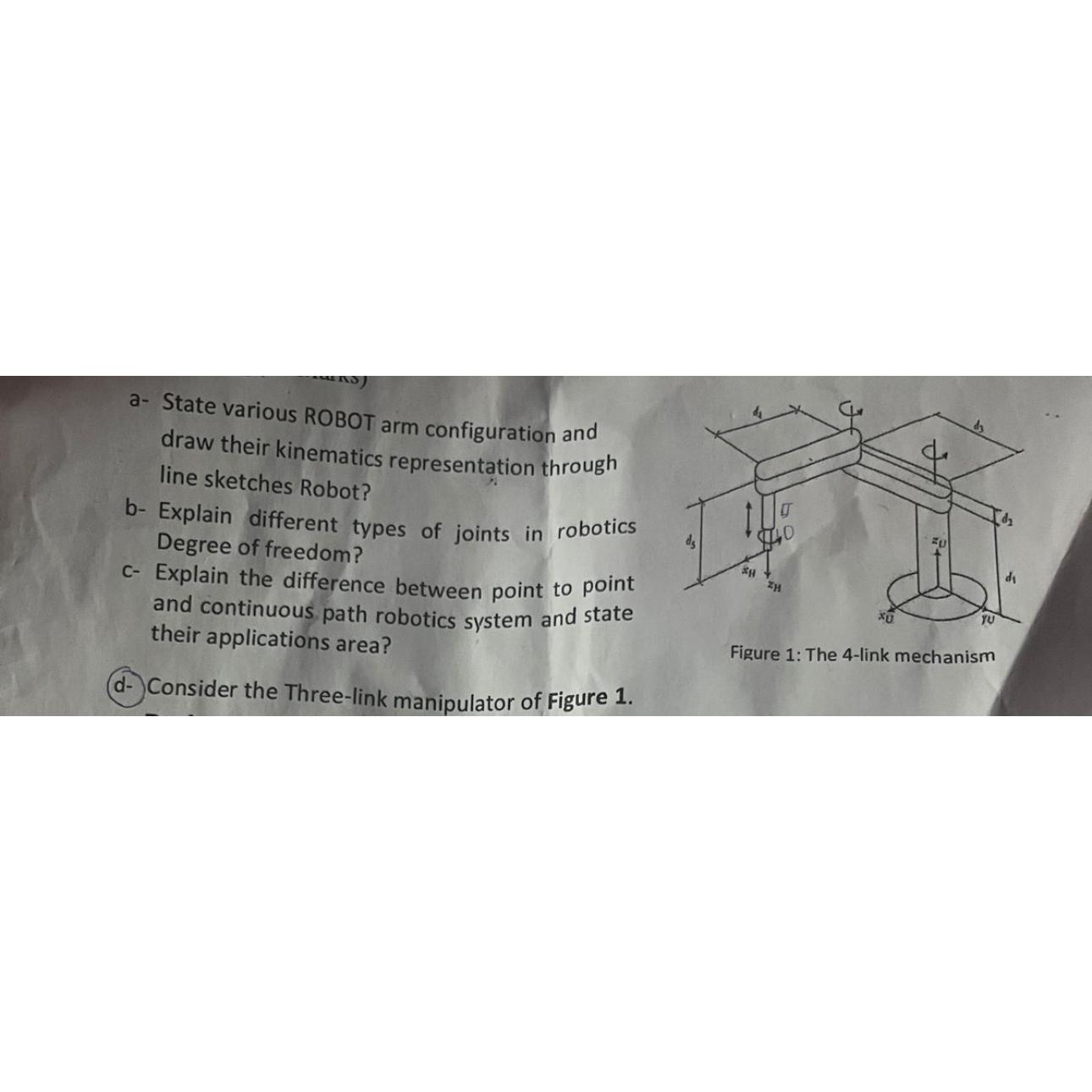
a - State various ROBOT arm configuration and draw their kinematics representation through line sketches Robot? b - Explain different types of joints in robotics
a State various ROBOT arm configuration and draw their kinematics representation through line sketches Robot?
b Explain different types of joints in robotics Degree of freedom?
c Explain the difference between point to point and continuous path robotics system and state their applications area?
d Consider the Threelink manipulator of Figure
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Vector Mechanics for Engineers Statics and Dynamics
Authors: Ferdinand Beer, E. Russell Johnston, Jr., Elliot Eisenberg, William Clausen, David Mazurek, Phillip Cornwell
8th Edition
73212229, 978-0073212227