

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
A system the loop transfer function with unity feedback has K (s + 6)* We desire the steady-state error to a step input to
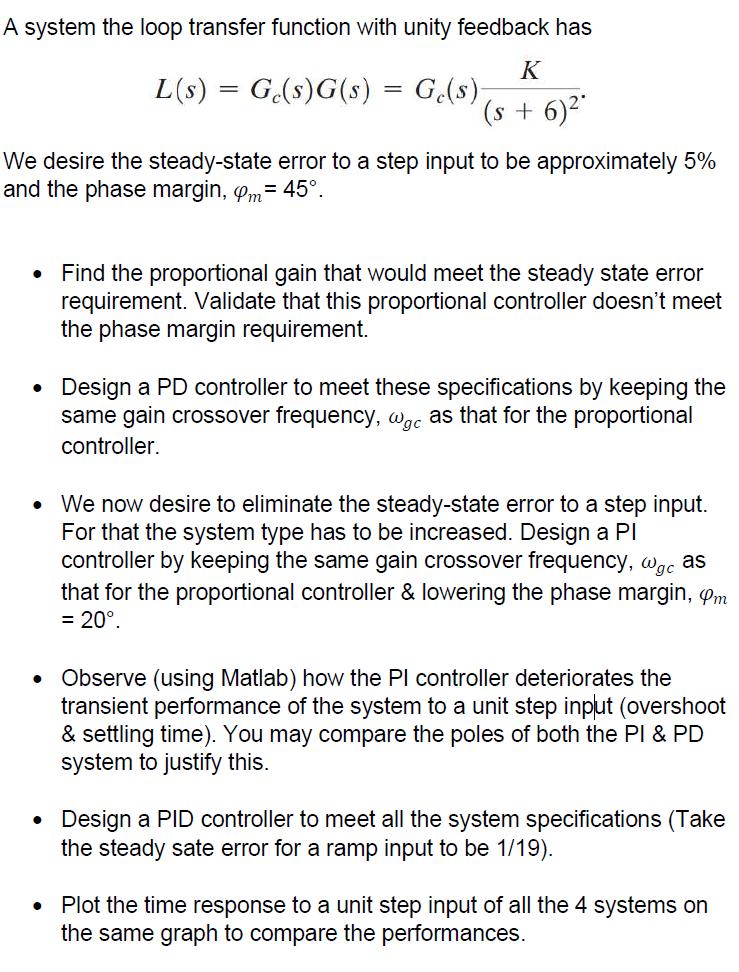
A system the loop transfer function with unity feedback has K (s + 6)* We desire the steady-state error to a step input to be approximately 5% and the phase margin, m= 45. L(s) = Ge(s)G(s) = Ge(s)- Find the proportional gain that would meet the steady state error requirement. Validate that this proportional controller doesn't meet the phase margin requirement. Design a PD controller to meet these specifications by keeping the same gain crossover frequency, wgc as that for the proportional controller. We now desire to eliminate the steady-state error to a step input. For that the system type has to be increased. Design a PI controller by keeping the same gain crossover frequency, wgc as that for the proportional controller & lowering the phase margin, m = 20. Observe (using Matlab) how the PI controller deteriorates the transient performance of the system to a unit step input (overshoot & settling time). You may compare the poles of both the PI & PD system to justify this. Design a PID controller to meet all the system specifications (Take the steady sate error for a ramp input to be 1/19). Plot the time response to a unit step input of all the 4 systems on the same graph to compare the performances.
Step by Step Solution
★★★★★
3.44 Rating (154 Votes )
There are 3 Steps involved in it
Step: 1
Here are the steps to design the controllers as specified 1 Proportional controller to meet 5 steady ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Control Systems
Authors: Richard C. Dorf, Robert H. Bishop
13th Edition
0134407628, 978-0134407623