

Question: A three-machine workcell uses one single robot to load and unload the machines. The robot picks up a part from incoming conveyor and loads it
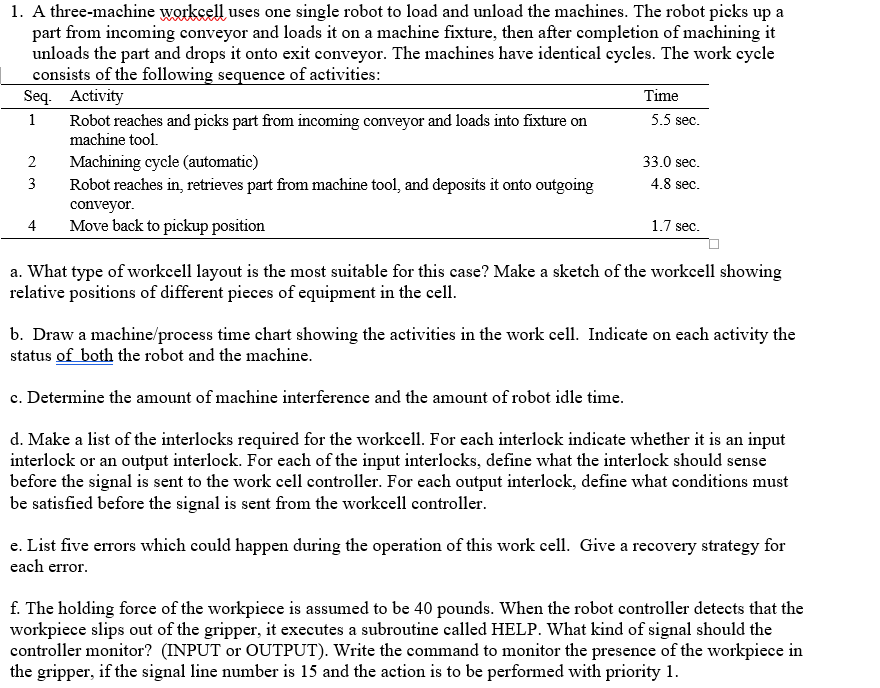
A three-machine workcell uses one single robot to load and unload the machines. The robot picks up a part from incoming conveyor and loads it on a machine fixture, then after completion of machining it unloads the part and drops it onto exit conveyor. The machines have identical cycles. The work cycle Consists of the following sequence of activities: a. What type of workcell layout is the most suitable for this case? Make a sketch of the workcell showing relative positions of different pieces of equipment in the cell. b. Draw a machine process time chart showing the activities in the work cell. Indicate on each activity the status of both the robot and the machine. c. Determine the amount of machine interference and the amount of robot idle time. d. Make a list of the interlocks required for the workcell. For each interlock indicate whether it is an input interlock or an output interlock. For each of the input interlocks, define what the interlock should sense before the signal is sent to the work cell controller. For each output interlock, define what conditions must be satisfied before the signal is sent from the workcell controller. e. List five errors which could happen during the operation of this work cell. Give a recovery strategy for each error. f. The holding force of the workpiece is assumed to be 40 pounds. When the robot controller detects that the workpiece slips out of the gripper. it executes a subroutine called HELP. What kind of signal should the controller monitor? (INPUT or OUTPUT). Write the command to monitor the presence of the workpiece in the gripper. if the signal line number is 15 and the action is to be performed with priority 1
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts