

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
An under-damped 2nd-order plant G (s) is to be controlled using a forward path controller Ge(s) and a unity negative feedback loop, as shown
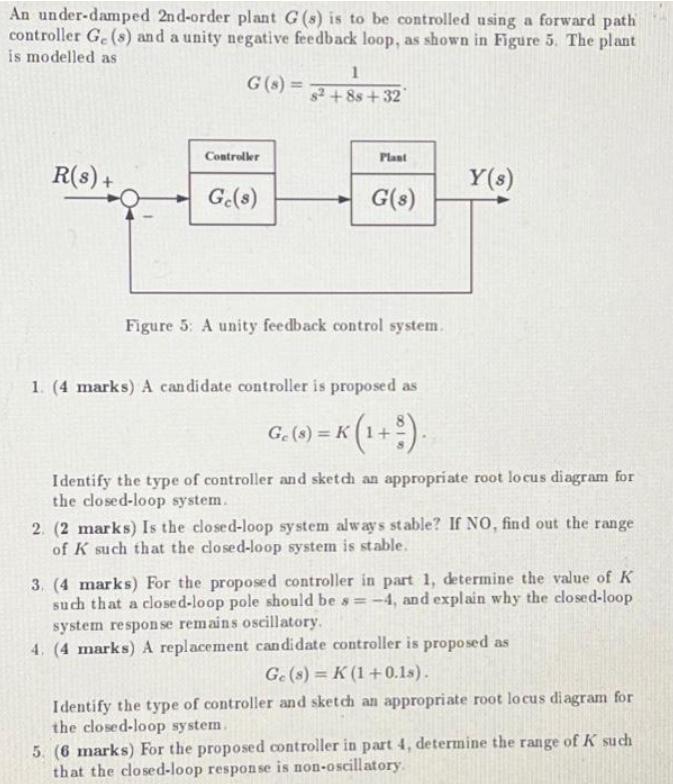
An under-damped 2nd-order plant G (s) is to be controlled using a forward path controller Ge(s) and a unity negative feedback loop, as shown in Figure 5. The plant is modelled as R(s) + G (s) = Controller Ge(s) 1 8 +8s +32 Plant G(s) Figure 5: A unity feedback control system. Y(s) 1. (4 marks) A candidate controller is proposed as Ge(s) = K (1 + :). Identify the type of controller and sketch an appropriate root locus diagram for the closed-loop system. 2. (2 marks) Is the closed-loop system always stable? If NO, find out the range of K such that the closed-loop system is stable. 3. (4 marks) For the proposed controller in part 1, determine the value of K such that a closed-loop pole should be s = -4, and explain why the closed-loop system response remains oscillatory. 4. (4 marks) A replacement candidate controller is proposed as Ge (8)= K (1+0.1s). Identify the type of controller and sketch an appropriate root locus diagram for the closed-loop system. 5. (6 marks) For the proposed controller in part 4, determine the range of K such that the closed-loop response is non-oscillatory.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Physics
Authors: Alan Giambattista, Betty Richardson, Robert Richardson
2nd edition
77339681, 978-0077339685