

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Appendix Y YA O' Fig 1. Kinematics of the robotic vehicle The non-linear, kinematics model of the robot is described by the following equations:
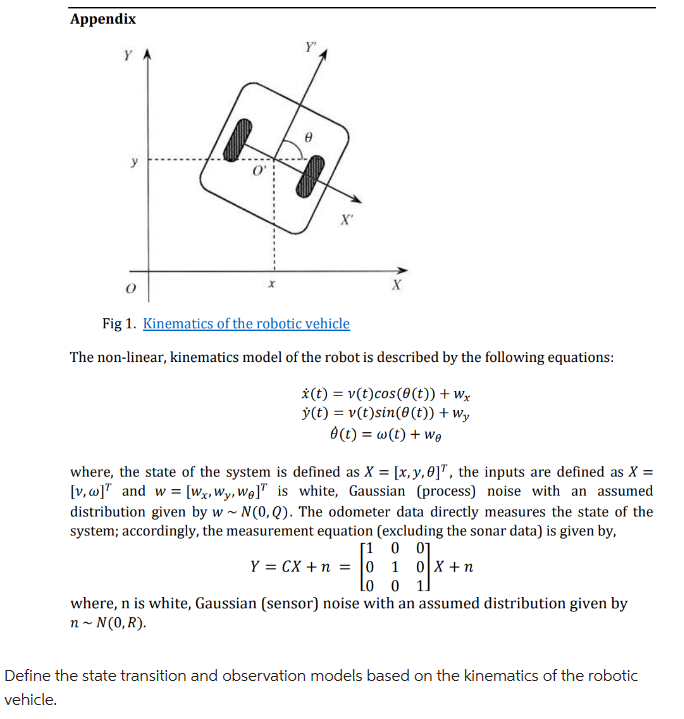
Appendix Y" YA O' Fig 1. Kinematics of the robotic vehicle The non-linear, kinematics model of the robot is described by the following equations: x(t) = v(t)cos((t)) + wx y(t) = v(t)sin(0(t)) + wy (t) = w(t) + Wo where, the state of the system is defined as X = [x,y,0], the inputs are defined as X = [v,w] and w=[Wx, Wy, We]" is white, Gaussian (process) noise with an assumed distribution given by w ~N(0,Q). The odometer data directly measures the state of the system; accordingly, the measurement equation (excluding the sonar data) is given by, [100] YCXn010X+n 10 0 1 where, n is white, Gaussian (sensor) noise with an assumed distribution given by n~ N(O, R). Define the state transition and observation models based on the kinematics of the robotic vehicle.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Materials Science and Engineering An Integrated Approach
Authors: David G. Rethwisch
4th Edition
1118214226, 1118061608, 9781118214220, 978-1118061602