artifical intelligence
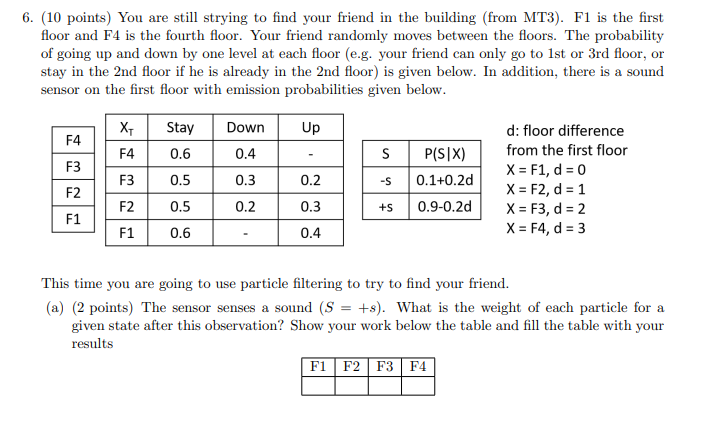
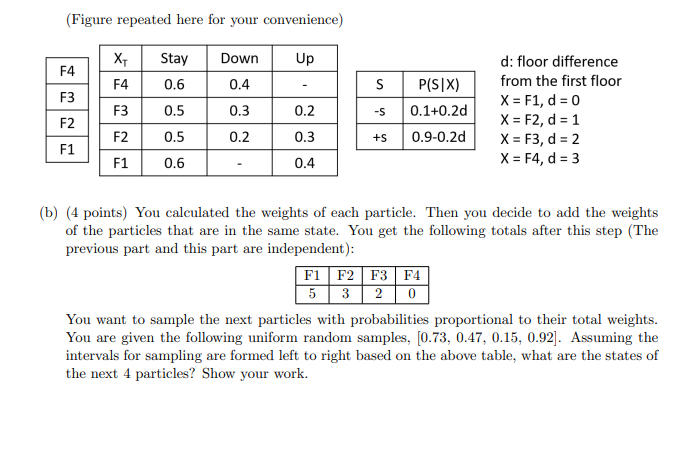
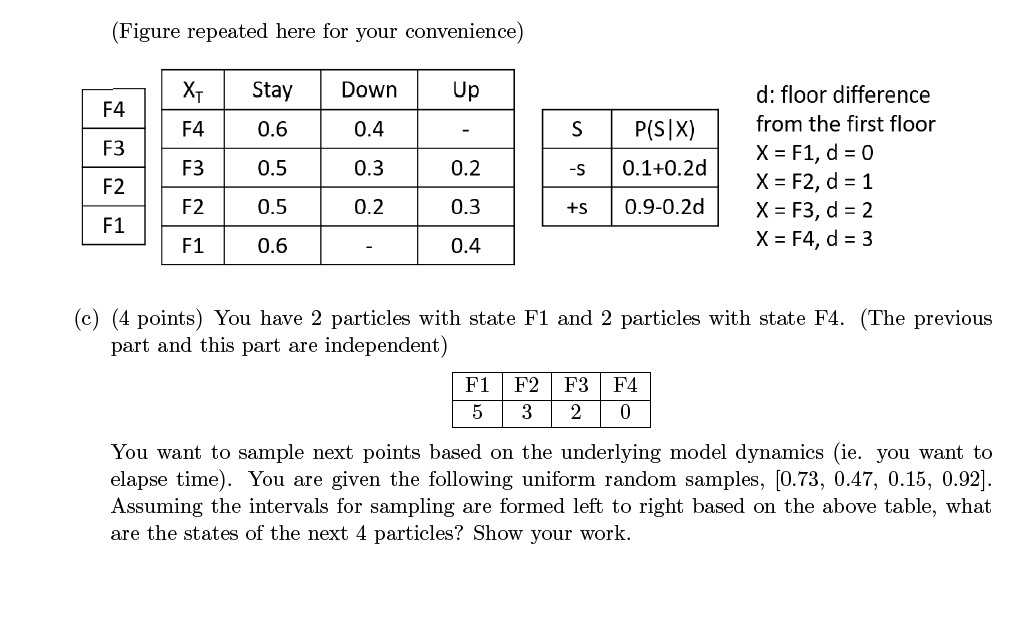
6. (10 points) You are still strying to find your friend in the building (from MT3). F1 is the first floor and F4 is the fourth floor. Your friend randomly moves between the floors. The probability of going up and down by one level at each floor (e.g. your friend can only go to 1st or 3rd floor, or stay in the 2nd floor if he is already in the 2nd floor) is given below. In addition, there is a sound sensor on the first floor with emission probabilities given below. Up F4 X F4 F3 Down 0.4 S F3 F2 Stay 0.6 0.5 0.5 0.6 0.3 0.2 -S P(SIX) 0.1+0.2d 0.9-0.2d d: floor difference from the first floor X = F1, d = 0 X = F2, d = 1 X = F3, d = 2 X = F4, d = 3 0.2 0.3 +S F1 F2 F1 0.4 This time you are going to use particle filtering to try to find your friend. (a) (2 points) The sensor senses a sound (S = +s). What is the weight of each particle for a given state after this observation? Show your work below the table and fill the table with your results F1 F2 F3 F4 (Figure repeated here for your convenience) Up F4 XT F4 Down 0.4 S F3 WH1B-R F3 Stay 0.6 0.5 0.5 0.6 0.3 -S P(S) 0.1+0.2d 0.9-0.2d 0.2 0.3 d: floor difference from the first floor X = F1, d = 0 X = F2, d = 1 X = F3, d = 2 X = F4, d = 3 F2 0.2 +S F1 F2 F1 0.4 (b) (4 points) You calculated the weights of each particle. Then you decide to add the weights of the particles that are in the same state. You get the following totals after this step (The previous part and this part are independent): F1 F2 F3 F4 5 3 2 0 You want to sample the next particles with probabilities proportional to their total weights. You are given the following uniform random samples, (0.73, 0.47, 0.15, 0.92]. Assuming the intervals for sampling are formed left to right based on the above table, what are the states of the next 4 particles? Show your work. (Figure repeated here for your convenience) XT Stay Down Up F4 F4 HERE 0.6 0.4 S | E | R | F3 P(SIX) 0.1+0.2d F3 0.5 0.3 0.2 -S d: floor difference from the first floor X = F1, d = 0 X = F2, d = 1 X = F3, d = 2 X = F4, d = 3 F2 F2 0.5 0.2 0.3 +S 0.9-0.2d F1 F1 0.6 0.4 (c) (4 points) You have 2 particles with state F1 and 2 particles with state F4. (The previous part and this part are independent) F2 F1 5 F3 2 F4 0 3 You want to sample next points based on the underlying model dynamics (ie. you want to elapse time). You are given the following uniform random samples, (0.73, 0.47, 0.15, 0.92]. Assuming the intervals for sampling are formed left to right based on the above table, what are the states of the next 4 particles? Show your work. 6. (10 points) You are still strying to find your friend in the building (from MT3). F1 is the first floor and F4 is the fourth floor. Your friend randomly moves between the floors. The probability of going up and down by one level at each floor (e.g. your friend can only go to 1st or 3rd floor, or stay in the 2nd floor if he is already in the 2nd floor) is given below. In addition, there is a sound sensor on the first floor with emission probabilities given below. Up F4 X F4 F3 Down 0.4 S F3 F2 Stay 0.6 0.5 0.5 0.6 0.3 0.2 -S P(SIX) 0.1+0.2d 0.9-0.2d d: floor difference from the first floor X = F1, d = 0 X = F2, d = 1 X = F3, d = 2 X = F4, d = 3 0.2 0.3 +S F1 F2 F1 0.4 This time you are going to use particle filtering to try to find your friend. (a) (2 points) The sensor senses a sound (S = +s). What is the weight of each particle for a given state after this observation? Show your work below the table and fill the table with your results F1 F2 F3 F4 (Figure repeated here for your convenience) Up F4 XT F4 Down 0.4 S F3 WH1B-R F3 Stay 0.6 0.5 0.5 0.6 0.3 -S P(S) 0.1+0.2d 0.9-0.2d 0.2 0.3 d: floor difference from the first floor X = F1, d = 0 X = F2, d = 1 X = F3, d = 2 X = F4, d = 3 F2 0.2 +S F1 F2 F1 0.4 (b) (4 points) You calculated the weights of each particle. Then you decide to add the weights of the particles that are in the same state. You get the following totals after this step (The previous part and this part are independent): F1 F2 F3 F4 5 3 2 0 You want to sample the next particles with probabilities proportional to their total weights. You are given the following uniform random samples, (0.73, 0.47, 0.15, 0.92]. Assuming the intervals for sampling are formed left to right based on the above table, what are the states of the next 4 particles? Show your work. (Figure repeated here for your convenience) XT Stay Down Up F4 F4 HERE 0.6 0.4 S | E | R | F3 P(SIX) 0.1+0.2d F3 0.5 0.3 0.2 -S d: floor difference from the first floor X = F1, d = 0 X = F2, d = 1 X = F3, d = 2 X = F4, d = 3 F2 F2 0.5 0.2 0.3 +S 0.9-0.2d F1 F1 0.6 0.4 (c) (4 points) You have 2 particles with state F1 and 2 particles with state F4. (The previous part and this part are independent) F2 F1 5 F3 2 F4 0 3 You want to sample next points based on the underlying model dynamics (ie. you want to elapse time). You are given the following uniform random samples, (0.73, 0.47, 0.15, 0.92]. Assuming the intervals for sampling are formed left to right based on the above table, what are the states of the next 4 particles? Show your work