

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Below is a 3-DOF serial robot manipulator with prismatic, revolute, and revolute joints from the base to the end-effector. Initial configuration is horizontally straight,
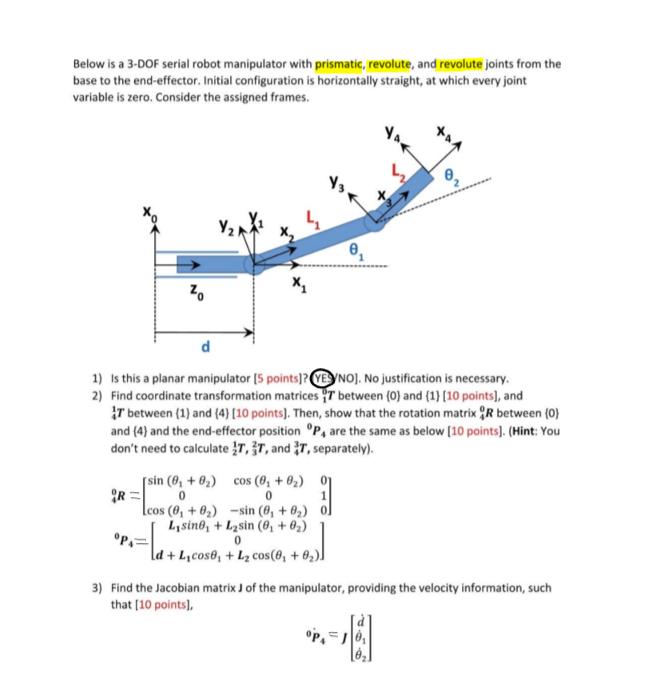
Below is a 3-DOF serial robot manipulator with prismatic, revolute, and revolute joints from the base to the end-effector. Initial configuration is horizontally straight, at which every joint variable is zero. Consider the assigned frames. Xo PA Zo R= Y 1) Is this a planar manipulator [5 points]? YEYNO]. No justification is necessary. 2) Find coordinate transformation matrices T between (0) and (1) [10 points], and T between (1) and (4) [10 points]. Then, show that the rotation matrix R between (0) and (4) and the end-effector position P, are the same as below [10 points). (Hint: You don't need to calculate T, T, and T, separately). X [sin (0, +0) cos (0, +0) 0 0 J [cos (0, +8) -sin (0, +8) 0. Lysine,+Lsin (0 +0) 0 d+1,cos0, + 12 cos(0, e 3) Find the Jacobian matrix J of the manipulator, providing the velocity information, such that [10 points], op=1
Step by Step Solution
★★★★★
3.43 Rating (156 Votes )
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Mechanics of Materials
Authors: James M. Gere, Barry J. Goodno
7th edition
495438073, 978-0495438076