

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Below is a simple planar manipulator composed of two serial chains connected, where only Joints 1 and 3 are active (meaning that it has
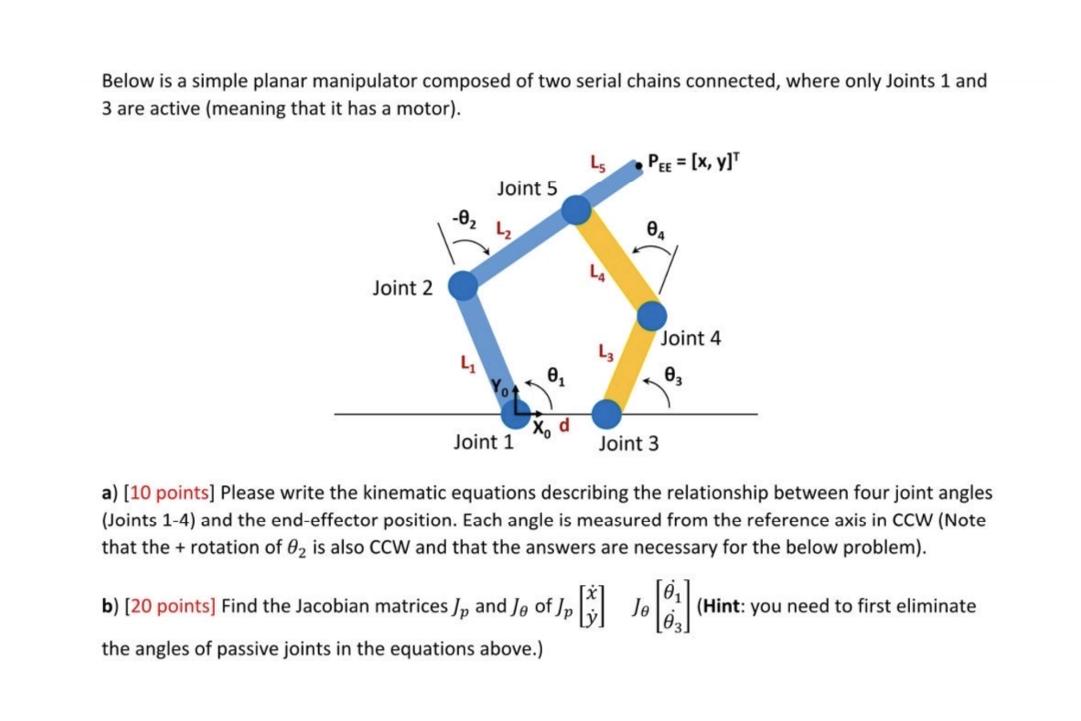
Below is a simple planar manipulator composed of two serial chains connected, where only Joints 1 and 3 are active (meaning that it has a motor). L5 Joint 5 84 O X, d Joint 2 Joint 1 PEE = [x, y] 0 Joint 4 03 Joint 3 a) [10 points] Please write the kinematic equations describing the relationship between four joint angles (Joints 1-4) and the end-effector position. Each angle is measured from the reference axis in CCW (Note that the + rotation of 02 is also CCW and that the answers are necessary for the below problem). b) [20 points] Find the Jacobian matrices Jp and J. of Jp Je Jo [0] the angles of passive joints in the equations above.) (Hint: you need to first eliminate
Step by Step Solution
★★★★★
3.44 Rating (151 Votes )
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
College Mathematics For Business Economics, Life Sciences, And Social Sciences
Authors: Raymond Barnett, Michael Ziegler, Karl Byleen, Christopher Stocker
14th Edition
0134674146, 978-0134674148