

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Calculate the speed of the tip of the arm as a function of joint turnover. Describe the results in two forms: the robot's end-effector

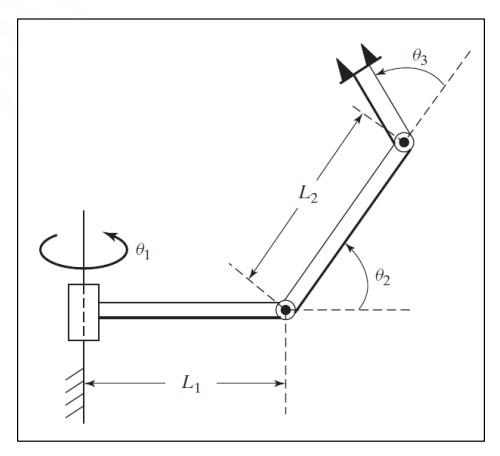
Calculate the speed of the tip of the arm as a function of joint turnover. Describe the results in two forms: the robot's end-effector coordinate system (4) and the base coordinate system {0} 2. The internal text of the image states the following: An end effector is applying a force of F=10i[N]. When the joint angles are in the state of 0 = [0, 30, 0], calculate the torque required for each joint. 0 L 02 03
Step by Step Solution
★★★★★
3.51 Rating (154 Votes )
There are 3 Steps involved in it
Step: 1
Here are the stepbystep calculations 1 End effector speed in 4 coordinate syst...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Control Systems
Authors: Richard C. Dorf, Robert H. Bishop
12th edition
136024580, 978-0136024583