Can anyone assist me with this? This is PLC code. What should the code look like for this? 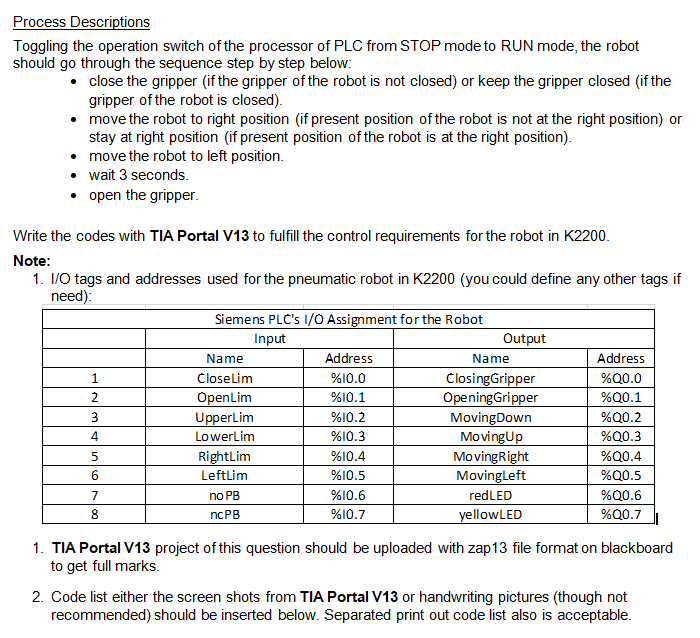
Process Descriptions Toggling the operation switch of the processor of PLC from STOP mode to RUN mode, the robot should go through the sequence step by step below: close the gripper (if the gripper of the robot is not closed) or keep the gripper closed (if the gripper of the robot is closed). move the robot to right position (if present position of the robot is not at the right position) or stay at right position (if present position of the robot is at the right position). move the robot to left position. wait 3 seconds. open the gripper. Write the codes with TIA Portal V13 to fulfill the control requirements for the robot in K2200. Note: 1. I/O tags and addresses used for the pneumatic robot in K2200 (you could define any other tags if need): Siemens PLC's 1/0 Assignment for the Robot Input Output Name Address Name Address 1 Closelim %10.0 Closing Gripper %Q0.0 OpenLim %10.1 OpeningGripper %Q0.1 Upperlim %10.2 MovingDown %Q0.2 Lowerlim %10.3 MovingUp %Q0.3 5 RightLim %10.4 MovingRight %Q0.4 6 LeftLim %10.5 MovingLeft %Q0.5 7 no PB %10.6 redLED %Q0.6 ncPB %10.7 yellowLED %Q0.7 2 3 4 8 1. TIA Portal V13 project of this question should be uploaded with zap 13 file format on blackboard to get full marks. 2. Code list either the screen shots from TIA Portal V13 or handwriting pictures (though not recommended) should be inserted below. Separated print out code list also is acceptable. Process Descriptions Toggling the operation switch of the processor of PLC from STOP mode to RUN mode, the robot should go through the sequence step by step below: close the gripper (if the gripper of the robot is not closed) or keep the gripper closed (if the gripper of the robot is closed). move the robot to right position (if present position of the robot is not at the right position) or stay at right position (if present position of the robot is at the right position). move the robot to left position. wait 3 seconds. open the gripper. Write the codes with TIA Portal V13 to fulfill the control requirements for the robot in K2200. Note: 1. I/O tags and addresses used for the pneumatic robot in K2200 (you could define any other tags if need): Siemens PLC's 1/0 Assignment for the Robot Input Output Name Address Name Address 1 Closelim %10.0 Closing Gripper %Q0.0 OpenLim %10.1 OpeningGripper %Q0.1 Upperlim %10.2 MovingDown %Q0.2 Lowerlim %10.3 MovingUp %Q0.3 5 RightLim %10.4 MovingRight %Q0.4 6 LeftLim %10.5 MovingLeft %Q0.5 7 no PB %10.6 redLED %Q0.6 ncPB %10.7 yellowLED %Q0.7 2 3 4 8 1. TIA Portal V13 project of this question should be uploaded with zap 13 file format on blackboard to get full marks. 2. Code list either the screen shots from TIA Portal V13 or handwriting pictures (though not recommended) should be inserted below. Separated print out code list also is acceptable