

Question: Consider a 3-link Cartesian manipulator shown in the figure. (1) Compute the inertia tensor J; for each link i = 1,2,3, relative to the
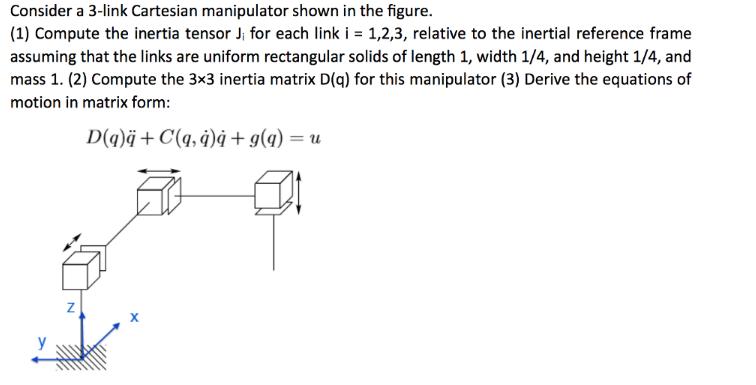
Consider a 3-link Cartesian manipulator shown in the figure. (1) Compute the inertia tensor J; for each link i = 1,2,3, relative to the inertial reference frame assuming that the links are uniform rectangular solids of length 1, width 1/4, and height 1/4, and mass 1. (2) Compute the 3x3 inertia matrix D(q) for this manipulator (3) Derive the equations of motion in matrix form: D(q)+C(q, 4) + g(g) = u
Step by Step Solution
3.24 Rating (153 Votes )
There are 3 Steps involved in it
To solve this problem lets go through the steps one by one Step 1 Compute the Inertia Tensor Ji Each ... View full answer

Get step-by-step solutions from verified subject matter experts