

Question: Consider an empty (just the outer frame and skin) 3U CubeSat to be a rectangular hollow solid 30 cm 10 cm 10 cm. For

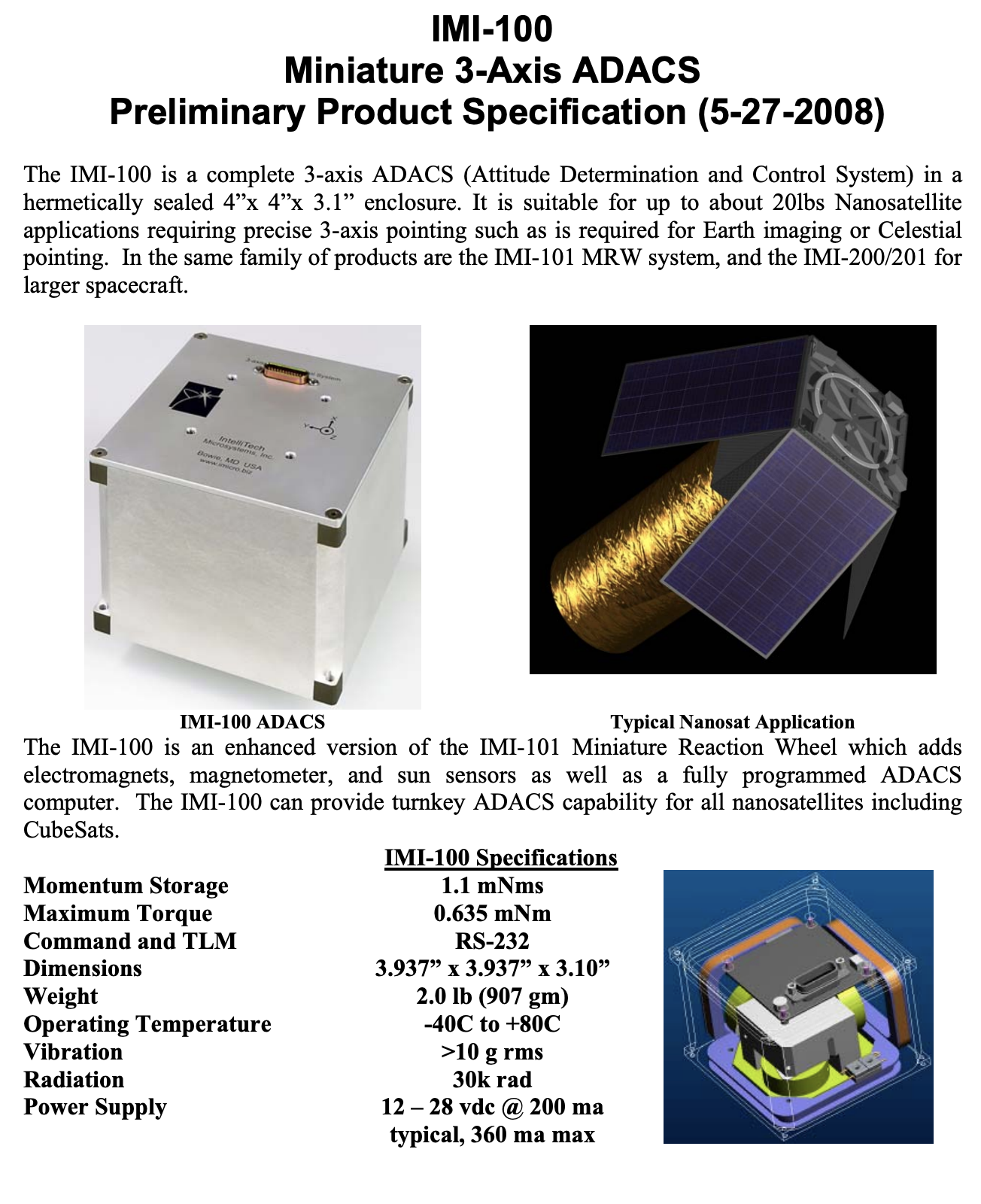
Consider an empty (just the outer frame and skin) 3U CubeSat to be a rectangular hollow solid 30 cm 10 cm 10 cm. For purposes of inertia calculation, assume the mass is distributed uniformly on the outer area of the solid (for instance, it is made of connected pieces of sheet metal, all cut from the same thin sheet). Take the total mass to be 0.5 kg for the empty spacecraft. Find the principal moments of inertia Ixx, Iyy, Izz of the empty spacecraft (where z is the long direction), about the spacecraft center of mass. You can find the moments of inertia for a thin uniform rectangular plate on the web, and you will need to use the parallel axis theorem. Consider the empty 3U cubesat of the previous problem. The IMI-100 attitude control system (ACS) (see posted spec sheet) is installed in the empty cubesat, with the center of mass of the ACS located at the center of the cubesat, and the short dimension of the ACS aligned with the long axis of the cubesat. The spec sheet doesn't give moments, but assume the mass is uniformly distributed in its rectangular box. (a) Find the principal moments of inertia Ixx, Iyy, Izz of the spacecraft (take the z-axis to be the long axis) including the empty cubesat and the IMI-100. (No batteries or anything else. Take the empty spacecraft moments from the previous problem.) (b) Using the installed IMI-100, analyze a reorientation of the spacecraft as follows. The spacecraft is initially non-rotating and oriented with its long axis horizontal, aligned with the velocity vector (orbit is circular so the flight path angle is zero). The space- craft is to be rotated 90 degrees in pitch to point the long axis towards nadir (straight down), and at the end of the rotation, the rotation rate is to be again zero. The maneuver should be executed as rapidly as possible, so the maximum available torque is to be used. The appropriate reaction wheel must be torqued first in one direc- tion to start the angular acceleration, then in the opposite direction to stop the rotation. Plot the applied torque, the angular velocity, and the pitch angle over time. How long does this maneuver take? Note Assume in this calculation that the mass of the reaction wheel is negligible, so the torque applies to the entire spacecraft. (In reality we would need to consider the torque as acting on the spacecraft excluding the reaction wheel.) A small spherical satellite has radius 10 cm and mass 15 kg. It is in a circular LEO at altitude 300 km. (a) Taking the atmosphere at that altitude to be purely O atoms at number density 5 108 cm, what is the force on the satellite due to atmospheric drag? Take the drag coefficient CD to be 2. (b) What is the change in specific orbital energy per second due to atmospheric drag? (Remember that the power exerted by a force on a moving object is given by . V.) (c) How long will this satellite take for its altitude to decrease by 10 km? (Do this in a sim- ple approximate way by comparing the result of the previous part with the difference in specific orbital energy between a 300-km orbit and a 290-km orbit.) (d) Repeat the above calculations for a satellite with the same average density as the 10-cm one but with a radius of 3 m. IMI-100 Miniature 3-Axis ADACS Preliminary Product Specification (5-27-2008) The IMI-100 is a complete 3-axis ADACS (Attitude Determination and Control System) in a hermetically sealed 4"x 4"x 3.1" enclosure. It is suitable for up to about 20lbs Nanosatellite applications requiring precise 3-axis pointing such as is required for Earth imaging or Celestial pointing. In the same family of products are the IMI-101 MRW system, and the IMI-200/201 for larger spacecraft. Microsystems, Inc. IntelliTech Bowie, MD USA www.micro.biz IMI-100 ADACS Typical Nanosat Application The IMI-100 is an enhanced version of the IMI-101 Miniature Reaction Wheel which adds electromagnets, magnetometer, and sun sensors as well as a fully programmed ADACS computer. The IMI-100 can provide turnkey ADACS capability for all nanosatellites including CubeSats. Momentum Storage Maximum Torque Command and TLM Dimensions Weight Operating Temperature Vibration Radiation Power Supply IMI-100 Specifications 1.1 mNms 0.635 mNm RS-232 3.937" x 3.937" x 3.10" 2.0 lb (907 gm) -40 to +80C >10 g rms 30k rad 12-28 vdc @ 200 ma typical, 360 ma max
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts