

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Consider the robot given in Figure-1. Obtain the joint velocities 0, 02 (in rad/s) and d3 (in m/s), given the end effector velocity [xe
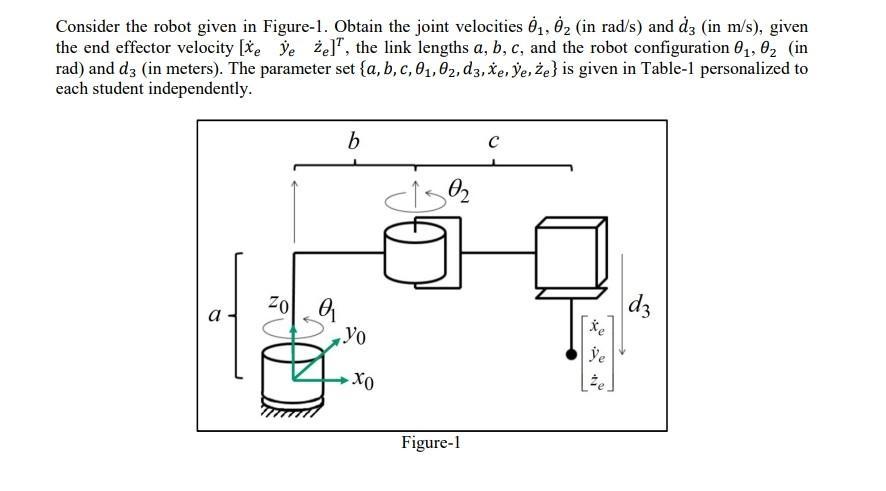
Consider the robot given in Figure-1. Obtain the joint velocities 0, 02 (in rad/s) and d3 (in m/s), given the end effector velocity [xe ye el, the link lengths a, b, c, and the robot configuration 0, 0 (in rad) and d3 (in meters). The parameter set (a, b, c, 0, 02, d3, Xe, ye, e} is given in Table-1 personalized to each student independently. a ZO b Yo XO 02 Figure-1 C Xe Ve d3
Step by Step Solution
★★★★★
3.39 Rating (165 Votes )
There are 3 Steps involved in it
Step: 1
in Figure1 is a threelink planar robotic manipulator This type of robot has three revolute joints 01 ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Introduction To MATLAB For Engineers
Authors: William Palm III
3rd Edition
0073534870, 978-0073534879