

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Consider the SCARA manipulator shown in the figure. Xe Ye Ze Pe joint angles 0, i=1,2,4 and d3. The variable de is measured in
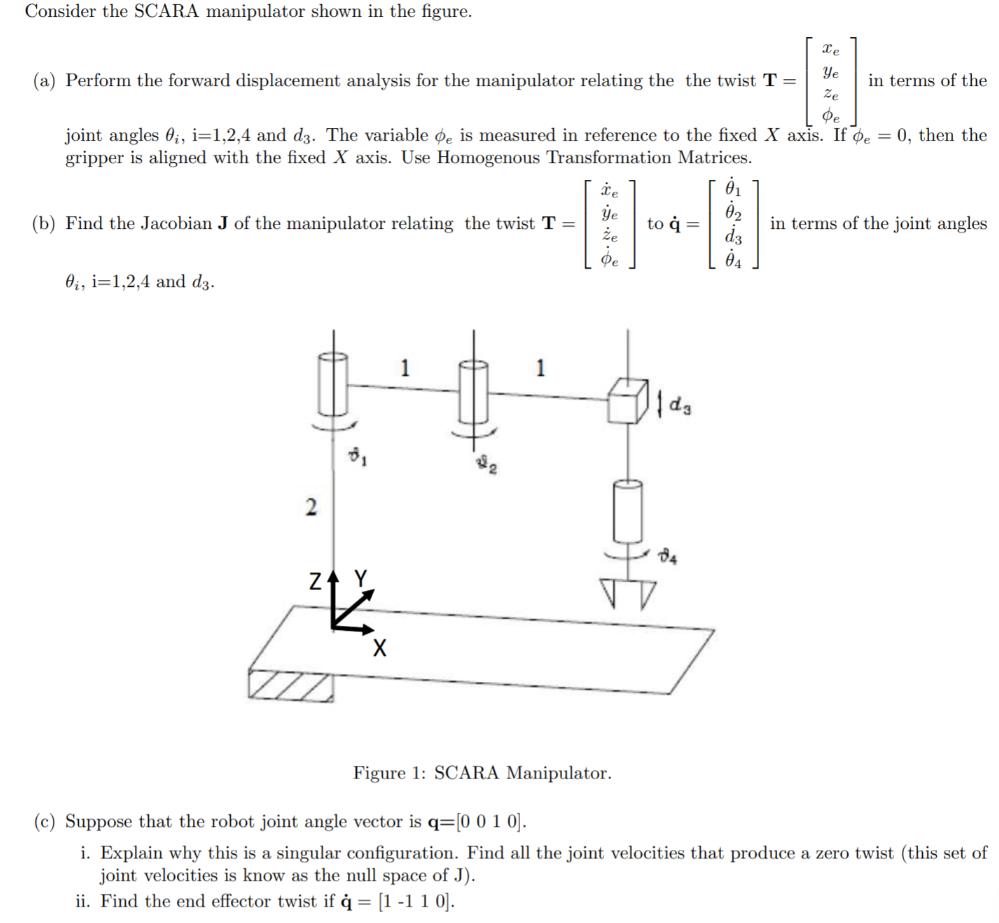
Consider the SCARA manipulator shown in the figure. Xe Ye Ze Pe joint angles 0, i=1,2,4 and d3. The variable de is measured in reference to the fixed X axis. If oe = 0, then the gripper is aligned with the fixed X axis. Use Homogenous Transformation Matrices. (a) Perform the forward displacement analysis for the manipulator relating the the twist T Xe Ye (b) Find the Jacobian J of the manipulator relating the twist T = Oi, i=1,2,4 and d3. 2 ZA Y X Figure 1: SCARA Manipulator. to q = dz 84 0 02 d3 04 in terms of the in terms of the joint angles (c) Suppose that the robot joint angle vector is q=[0 0 1 0]. i. Explain why this is a singular configuration. Find all the joint velocities that produce a zero twist (this set of joint velocities is know as the null space of J). ii. Find the end effector twist if q = [1 -1 10].
Step by Step Solution
★★★★★
3.33 Rating (159 Votes )
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Income Tax Fundamentals 2013
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
31st Edition
1111972516, 978-1285586618, 1285586611, 978-1285613109, 978-1111972516