

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
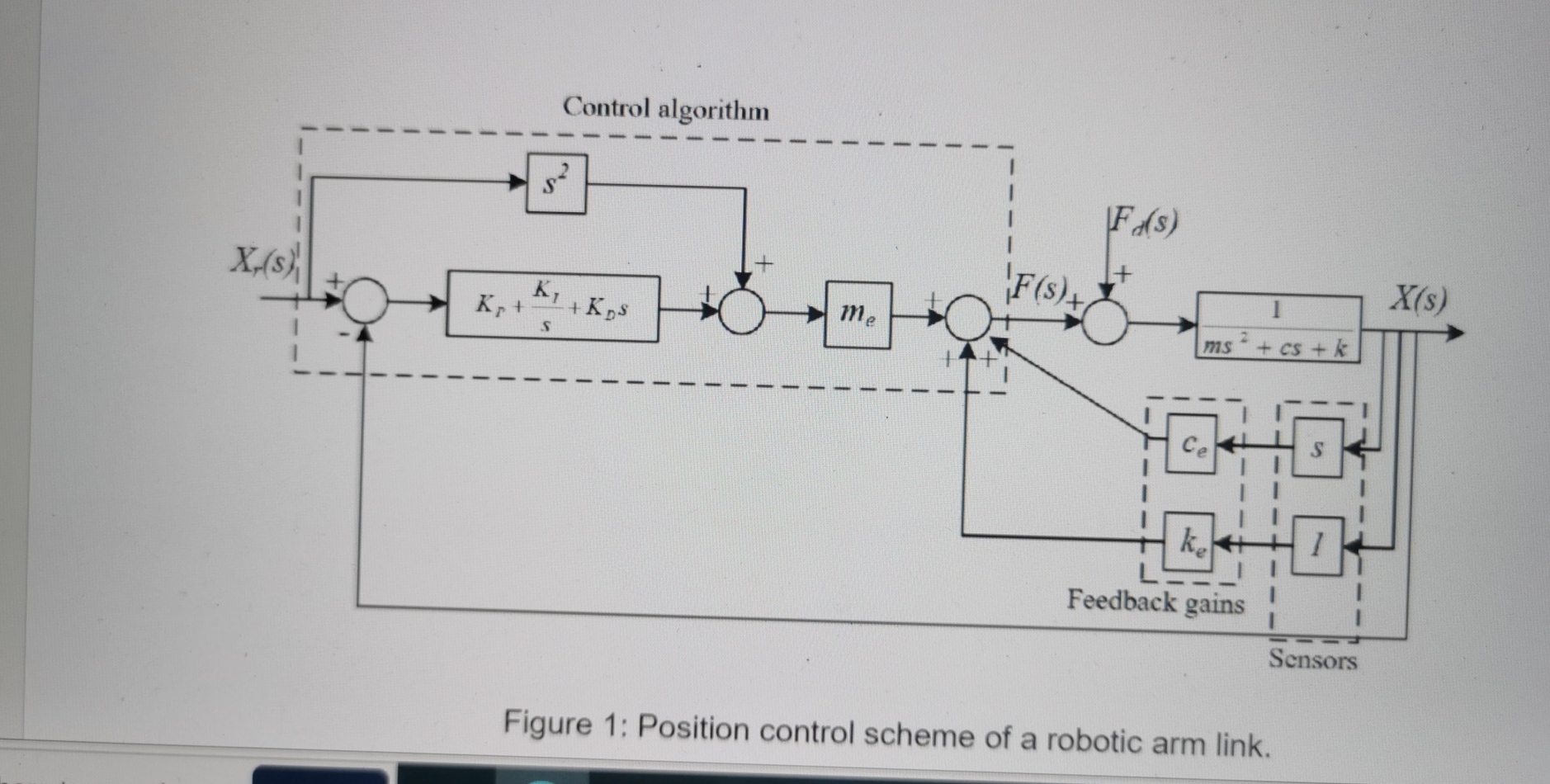
Control algorithm Figure 1 shows a position control scheme of robotic arm link, which has three feedback loops: two inner loops and one outer loop,
Control algorithm
Figure shows a position control scheme of robotic arm link, which has three feedback loops: two inner loops and one outer loop, and a feedforward compensator transfer function
Suppose that the estimates of the mass, damping, and stiffness are accurate so that ;; and
a Derive the transfer functions: and
b How well does this control scheme work?
Marks
Marks
c Obtain the expressions for the PID gains to achieve a damping ratio of and a closedloop time constant of specified value second.
Marks
Discuss any practical limitations to this scheme.
Marks
Total: Marks
Figure : Position control scheme of a robotic arm link.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Database Management
Authors: Fred R. McFadden, Jeffrey Slater, Mary B. Prescott
5th Edition
0805360549, 978-0805360547