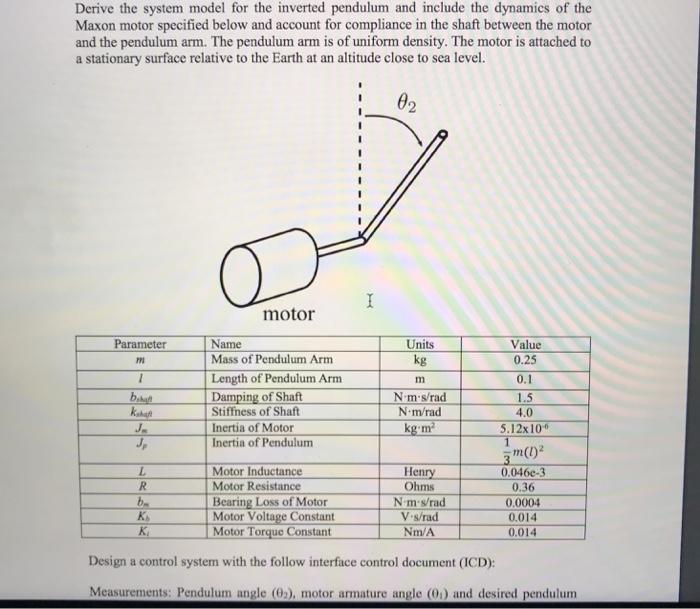
Derive the system model for the inverted pendulum and include the dynamics of the Maxon motor specified below and account for compliance in the shaft between the motor and the pendulum arm. The pendulum arm is of uniform density. The motor is attached to a stationary surface relative to the Earth at an altitude close to sea level. 2 motor Parameter Pr Name Mass of Pendulum Arm Units kg Value 0.25 0.1 Length of Pendulum Arm Damping of Shaft N m s/rad N m/rad Stiffness of Shaft 4.0 Inertia of Motor Inertia of Pendulum 5.12x10 Motor Inductance Motor Resistance Henry 0.046e-3 Ohms Bearing Loss of Motor Motor Voltage Constant Motor Torque Constant 0.36 0.0004 0.014 0.014 N m s/racd V-s/rad Nm/A Design a control system with the follow interface control document (ICD) Measurements: Pendulum angle (), motor armature angle (h) and desired pendulum 3. Controller Test (Evaluation): You must package your Matlab control function into a Simulink block of the inputs/outputs of your Matlab control function. Someone from the GAVLAB will then evaluate your controller by checking a. How well does the system track different references b. How does it react to various disturbances c. Is the controller robust to variation in parameters d. Does the controller handle sensor noise Derive the system model for the inverted pendulum and include the dynamics of the Maxon motor specified below and account for compliance in the shaft between the motor and the pendulum arm. The pendulum arm is of uniform density. The motor is attached to a stationary surface relative to the Earth at an altitude close to sea level. 2 motor Parameter Pr Name Mass of Pendulum Arm Units kg Value 0.25 0.1 Length of Pendulum Arm Damping of Shaft N m s/rad N m/rad Stiffness of Shaft 4.0 Inertia of Motor Inertia of Pendulum 5.12x10 Motor Inductance Motor Resistance Henry 0.046e-3 Ohms Bearing Loss of Motor Motor Voltage Constant Motor Torque Constant 0.36 0.0004 0.014 0.014 N m s/racd V-s/rad Nm/A Design a control system with the follow interface control document (ICD) Measurements: Pendulum angle (), motor armature angle (h) and desired pendulum 3. Controller Test (Evaluation): You must package your Matlab control function into a Simulink block of the inputs/outputs of your Matlab control function. Someone from the GAVLAB will then evaluate your controller by checking a. How well does the system track different references b. How does it react to various disturbances c. Is the controller robust to variation in parameters d. Does the controller handle sensor noise